【開催!】高知組み込み会 #5 「ロボットシステムのつくりかた」
イベント内容
2020/07/17 開催します!
2020/04/03に予定していてコロナウイルスの影響で延期となっていた『高知組み込み会 #5 「ロボットシステムのつくりかた」』を開催します。
日程とタイムテーブルが大幅に変更になったので再度確認して申し込みください。最新の「ロボットシステムのつくりかた」に興味のある人、実は前の日程だと参加できなかった人、前の日程も今回も参加な人など参加をお待ちしています。
※内容は変わりありません。
現地参加の方はコロナウイルスの影響を鑑み、マスク着用のうえご参加いただきますようお願いいたします。
- 日程:2020/04/03から2020/07/17になりました
- タイムテーブル:開始が30分前倒しになりました
再掲
高知組み込み会 #5 「ロボットシステムのつくりかた」
今回は京都大学からゲストをお招きしての開催です。
最先端のロボットシステムについて、わかりやすーくお話してくれます。 ロボットに興味はなくても、複雑なシステムのアーキテクチャを知ることは今後のエンジニア人生をよりよくしてくれる事でしょう。
イベント後の懇親会も開催しますので是非ご参加ください。
発表者より一言
皆さん「ロボット」と言ったらなにを思い浮かべるでしょうか? ヒト型・動物型のサービスロボットであったり自動掃除機に代表される家電系ロボットであったり工場生産ラインのロボットアームであったり,このようにロボットシステムは多機能/高機能を求められつつも多品種少量生産のドメインになっています.
ロボットソフトウェアの開発を加速できるプラットフォームとして,Robot Operating System(ROS)というものが非常に注目されています. 今回は,ロボットシステムのつくりかたをまず切り口として,そこからROSの生まれた背景や目指すところを紹介したいと思います. ROSの提供する機能や採用すべき利点,また,現在開発が急ピッチで進んでいる次世代のROS 2についてもその新機能と利点を解説します. 時間が許せば,講演者らが取り組んでいるROS関連の研究開発活動についても紹介したいと思っています.
発表者
高瀬 英希 (TAKASE hideki)
京都大学大学院情報学研究科 准教授
科学技術振興機構(JST) さきがけ研究者
- 組込みシステム向け消費エネルギー最適化技術
- プログラマブルSoCのためのソフトウェア志向のシステム設計環境 SWORDS: SoftWare ORiented Design and Synthesis framework for Zynq (on GitHub)
- ROS (Robot Operating System)を活用したロボットシステムの開発手法 mROS: a light-weight runtime environment of ROS nodes on embeddded devices (on GitHub)
2020/3/31 残念ながら4/3の開催を延期します
日程が決まりましたら、改めて連絡いたします。
2020/3/25 登壇者を追加しました ROSの実例をお話いただきます
2020/3/13 会場を同じフロアの大きい部屋に変えました
コロナウイルスの状況によっては開催を中止にする可能性もありますのであらかじめご了承ください
4月には元通りになってる事を祈ります。
高知組み込み会 #5 「ロボットシステムのつくりかた」
今回は京都大学からゲストをお招きしての開催です。
最先端のロボットシステムについて、わかりやすーくお話してくれます。 ロボットに興味はなくても、複雑なシステムのアーキテクチャを知ることは今後のエンジニア人生をよりよくしてくれる事でしょう。
イベント後の懇親会も開催しますので是非ご参加ください。
発表者より一言
皆さん「ロボット」と言ったらなにを思い浮かべるでしょうか? ヒト型・動物型のサービスロボットであったり自動掃除機に代表される家電系ロボットであったり工場生産ラインのロボットアームであったり,このようにロボットシステムは多機能/高機能を求められつつも多品種少量生産のドメインになっています.
ロボットソフトウェアの開発を加速できるプラットフォームとして,Robot Operating System(ROS)というものが非常に注目されています. 今回は,ロボットシステムのつくりかたをまず切り口として,そこからROSの生まれた背景や目指すところを紹介したいと思います. ROSの提供する機能や採用すべき利点,また,現在開発が急ピッチで進んでいる次世代のROS 2についてもその新機能と利点を解説します. 時間が許せば,講演者らが取り組んでいるROS関連の研究開発活動についても紹介したいと思っています.
発表者
高瀬 英希 (TAKASE hideki)
京都大学大学院情報学研究科 准教授
科学技術振興機構(JST) さきがけ研究者
- 組込みシステム向け消費エネルギー最適化技術
- プログラマブルSoCのためのソフトウェア志向のシステム設計環境 SWORDS: SoftWare ORiented Design and Synthesis framework for Zynq (on GitHub)
- ROS (Robot Operating System)を活用したロボットシステムの開発手法 mROS: a light-weight runtime environment of ROS nodes on embeddded devices (on GitHub)
タイムテーブル
| 時間 | 内容 | スピーカー |
|---|---|---|
| 18:00 | 開場 | |
| 18:30 | オープニング | kikuyuta |
| 18:35 | ロボットシステムのつくりかた | takasehideki |
| 19:35 | 仕事でのROS実例 | myasu |
| 19:55 | 質疑応答 | |
| 19:59 | クロージング | kikuyuta |
| 20:00 | 懇親会に移動 | 有志 |
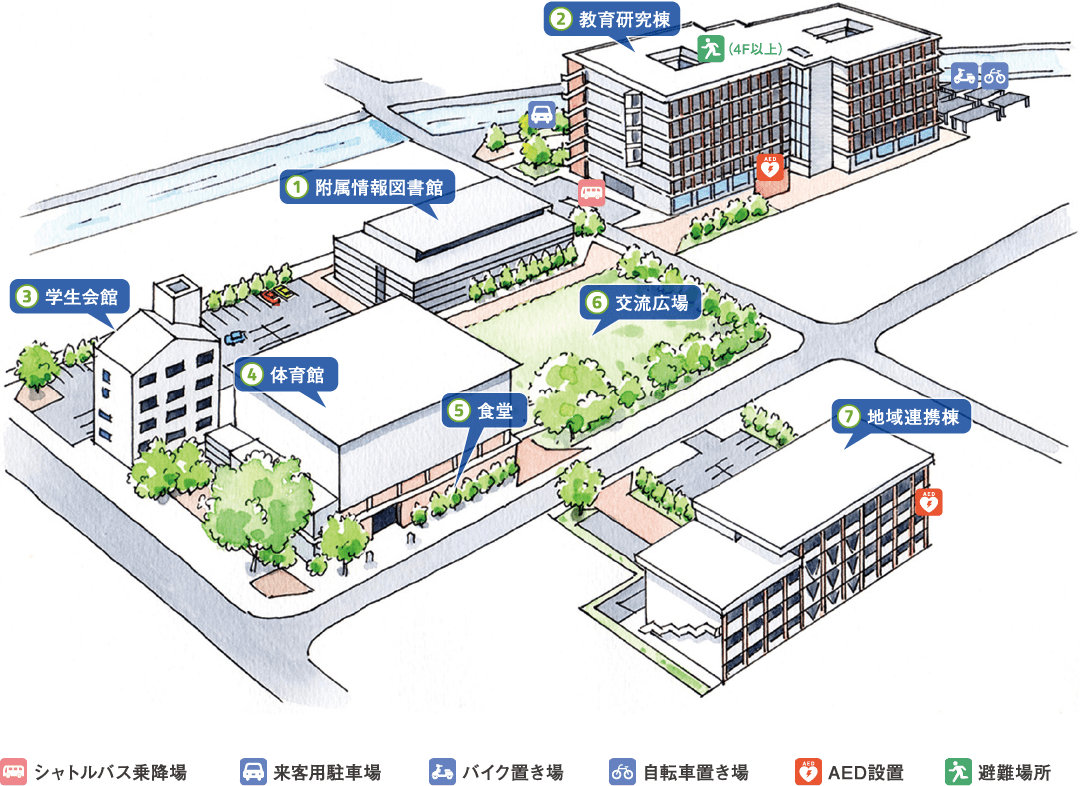
会場
高知工科大学 永国寺キャンパス 教育研究棟(下の図では右上の建物)
会場の部屋は調整中です。当日までに連絡します。
当日は「高知組み込み会」のロゴを掲示します。
 https://www.kochi-tech.ac.jp/about/campus/introduce/eikokuji_map.html
https://www.kochi-tech.ac.jp/about/campus/introduce/eikokuji_map.html
注意事項
※ 掲載タイミングや更新頻度によっては、情報提供元ページの内容と差異が発生しますので予めご了承ください。
※ 最新情報の確認や参加申込手続き、イベントに関するお問い合わせ等は情報提供元ページにてお願いします。






