
【ソニー・ホンダモビリティ】AFEELAはどう作られているのか── AD/ADASを支えるデータ・AI・開発哲学の全貌
異業種コラボは本当にうまくいくのか。ソニーとHondaが手を組みモビリティ会社を立ち上げたとき、多くの期待が集まったが、当初はなにもかもが順風満帆に進んだわけではなかった。 試行錯誤を重ねるなかで彼らが選んだのは、実現したい姿から逆算し、まずはやってみるという姿勢だった。本記事では、40個のセンサーと800 TOPSの計算能力を持つ電子制御ユニット(ECU)を備える「AFEELA」の開発現場から、技術選定の哲学、データ活用を2週間から1日に縮めた運用改革、異なる強みを束ねながらスピードと品質を両立してきたプロセスを紐解く。
異業種コラボは本当にうまくいくのか。ソニーとHondaが手を組みモビリティ会社を立ち上げたとき、多くの期待が集まったが、当初はなにもかもが順風満帆に進んだわけではなかった。
試行錯誤を重ねるなかで彼らが選んだのは、実現したい姿から逆算し、まずはやってみるという姿勢だった。本記事では、40個のセンサーと800 TOPSの計算能力を持つ電子制御ユニット(ECU)を備える「AFEELA」の開発現場から、技術選定の哲学、データ活用を2週間から1日に縮めた運用改革、異なる強みを束ねながらスピードと品質を両立してきたプロセスを紐解く。
アーカイブ動画
【第1部】AFEELAが描くモビリティのビジョンと開発体制
演者プロフィール
ソニー・ホンダモビリティ株式会社
オートノマスシステム開発部
システムデザイン課
シニアマネジャー
堀場 歩(ほりば・あゆむ)氏
モビリティテックカンパニーとしての意志と価値の三段構造

ソニー・ホンダモビリティ株式会社(以下「ソニー・ホンダモビリティ」)のパーパスは「多様な知で革新を追求し、人を動かす。」である。堀場氏が特に気に入っていると話すのは「人を動かす」の部分だという。単に移動手段を提供するだけではない。人の心を動かし、動機づけ、突き動かすモビリティを目指している。
会社のコーポレートアイデンティティは「Mobility Tech Company」。技術がイノベーションを起こすという強い意志のもと、エンジニアが中心となって開発を進めている。
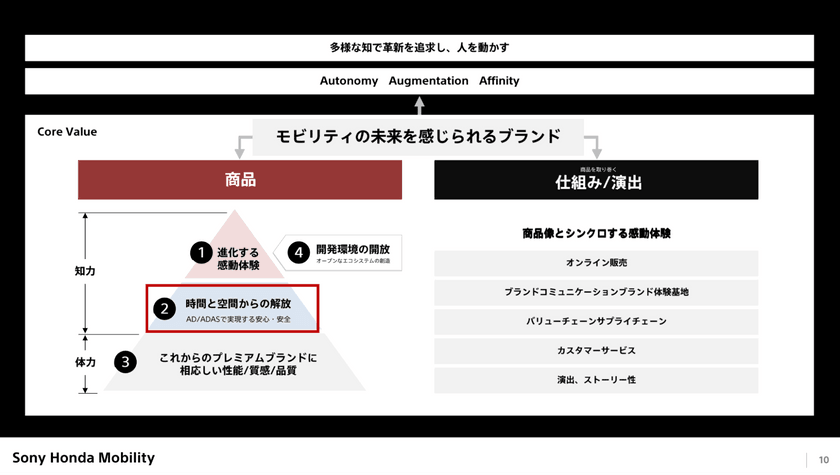
コアバリューは三角形の構造で整理されている。土台となるのは「体力」、つまりプレミアムブランドにふさわしいハードウェアの基本性能だ。その上に「知力」として時間と空間からの解放を担うADASが位置する。そして頂点には、進化する感動体験がある。この三層構造が、人とモビリティの新しい関係性を提供している。
将来のエンドツーエンドを見据えた知覚技術
ブランドコンセプトは3つの「A」で構成される。自立性を表す「Autonomy」、時空間の拡張を意味する「Augmentation」、そして共生を示す「Affinity」。これらの「A」と「感じる」を意味する「Feel」を組み合わせて、ブランド名「AFEELA」が生まれた。
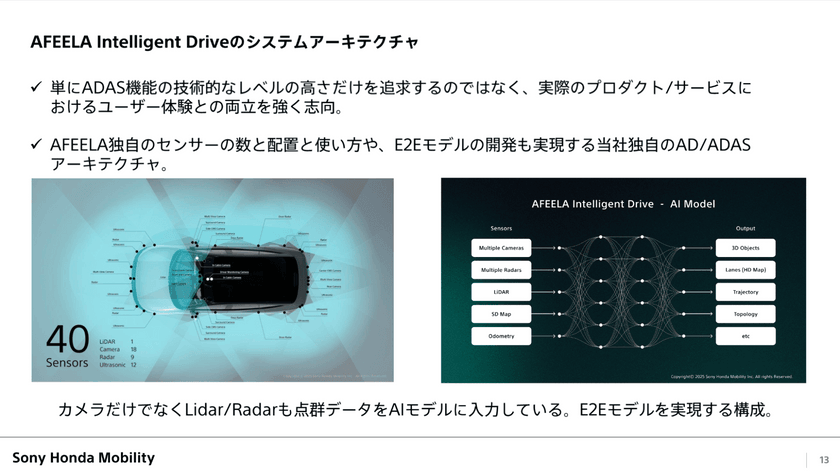
「AFEELA 1」には40個のセンサーが搭載されている。ルーフ上のLiDAR(レーザー光を照射して、その反射光の情報をもとに対象物までの距離や対象物の形などを計測する技術)、レーダー、カメラなどを備え、ADAS(Advanced Driver-Assistance Systems:先進運転支援システム)だけでなく車内のセンシングにも使われる。堀場氏によると、センサーの数が多いだけでなく、その使い方にもこだわっているという。
カメラ、LiDAR、レーダーという異なる種類のセンサーを組み合わせ、物体を認識した後にデータを融合するのではなく、LiDARとレーダーの点群データを直接AIモデルに入力する方式を採用している。手を入れない素に近いデータを取り扱う事により、高性能なエンドツーエンドモデルの実現を見据えた構成だ。
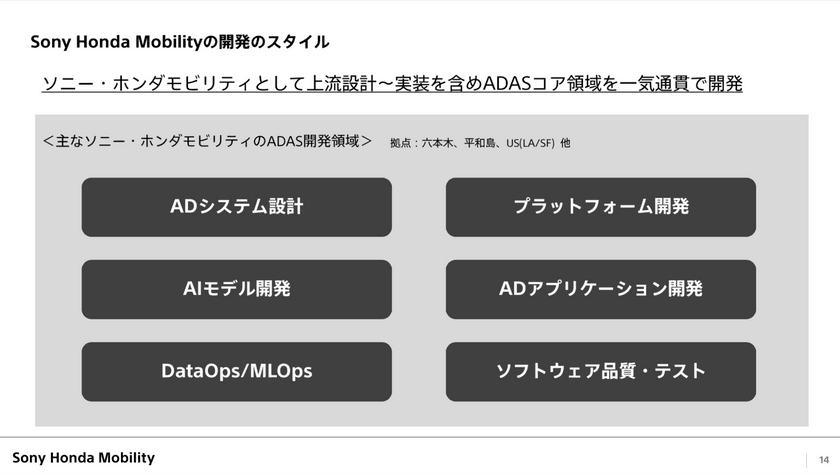
少数精鋭ながら、上流の設計から実装まで自分たちで手を動かす一気通貫の開発スタイルをとっている。「要求や仕様を決めて、あとは任せると外に丸投げするような開発は全くやっていない」と堀場氏は語る。日本では六本木の本社と平和島のガレージを拠点に、アメリカではサンフランシスコやロサンゼルスを拠点にテストを重ねている。
「筋の良い技術」を見極め、がむしゃらに進化させ続ける
堀場氏は「誤解を恐れずに言うと、機能としてのゴールを決めていない」と語る。一見すると無謀に聞こえるが、その背景には明確な理由がある。
「何年何月までにここまでできるようにする」と決めてしまうと、エンジニアは責任感から達成確率を上げようとする。その結果、手持ちの技術や置きにいった技術を選んでしまう。仮に、ある時間軸で目標をギリギリ達成しても、その後の進化は望めない。さらに悪いことに、目標達成時に他社と比べて劣っていたら、リカバリーが効かなくなる。
「ここまでできればいいですよね、と上司に判断を仰ぎたくなる。それは自分が単に楽になろうとしているときだと、常に自問自答している」(堀場氏)
判断軸は「先を見越したときに筋の良い技術であるかどうか」。その技術を選んだら、あとはがむしゃらに進化させ続けるだけだという。
実現したい姿から逆算する技術選定の流儀
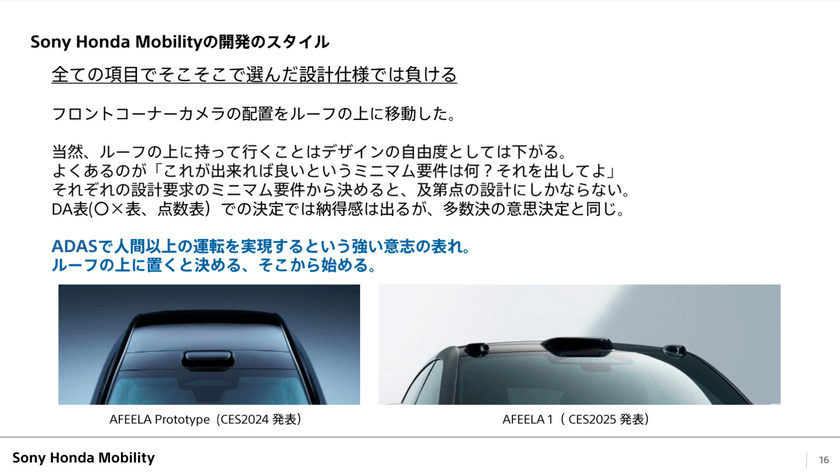
堀場氏は「すべての項目で”そこそこ”を選んだ設計仕様では負ける」と断言する。
「CES2024(コンシューマーエレクトロニクスショー)」で披露した「AFEELA」のプロトタイプと2025年の「AFEELA 1」を比較すると、フロントのコーナーを認識するためのカメラがルーフの上に移動している。この決断は大きなものだったという。ルーフ上に配置すればデザインの自由度は下がる。
通常の開発では色々な要件がコンフリクトを起こすため、まず必要なミニマム要件を定義する。例えばどこまでカメラは見えればいいのか、という必要な最低ラインを集めてから全体設計を始める。しかし堀場氏は、この方法では「凡庸な設計」「最大公約数の設計」にしかならないと考えている、と話す。
「DA表(決定分析表)や点数表を、死んだような顔でつけたことがある人もいるのでは。そういう仕様の決定は納得感は出るが、意志のこもったものにならない」(堀場氏)
ADASで人間以上の運転を実現するには、ドライバーが見ている世界よりも視野が広くなければならない。だからこそルーフの上にカメラを置く。そうすれば人間以上の運転ができる。
同社ではまず「ADASで戦う」という強い意志を示し、そこから周囲の知恵を借りて「それを実現するためには」を考え尽くす、その順番を徹底して進めていったそうだ。
堀場氏の講演から見えてくるのは、技術選定における意志の重要性である。ミニマム要件から積み上げるのではなく、実現したい姿から逆算する。多数決の意思決定ではなく、強い意志に基づく選択をする。この開発哲学は、自動車業界に限らず、新しい価値を生み出そうとするあらゆる組織に示唆を与えるものだろう。
【第2部】データセット開発──正確な認識を支えるデータ取得と前処理の設計
演者プロフィール
ソニー・ホンダモビリティ株式会社
オートノマスシステム開発部
データ・AI開発環境課
牧野 尚人(まきの・なおと)氏
AI開発の土台:データセット開発を構成する4つのフェーズ
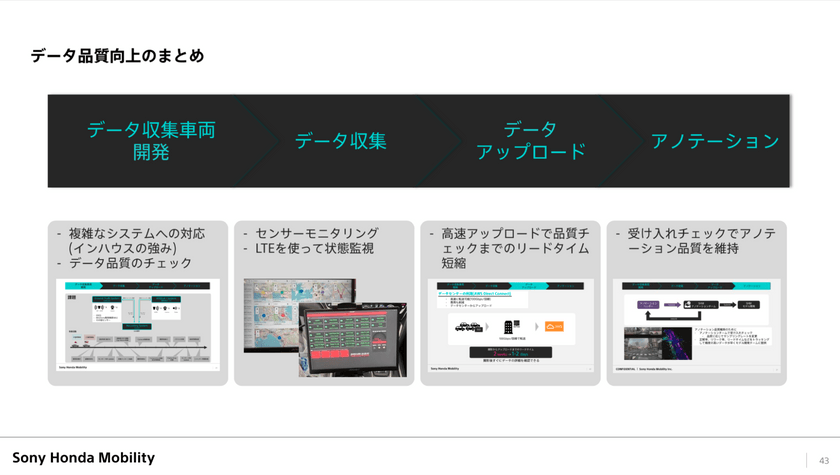
大量のデータをいかに早く届けるか。AI開発において、この問いは避けて通れない。ソニー・ホンダモビリティでは、先進運転支援システム「AFEELA Intelligent Drive」の開発にあたり、データ収集車両の開発からクラウドへのアップロード、アノテーションまでを一貫して内製化している。その結果、データが使えるようになるまでのリードタイムを2週間から1〜2日へと大幅に短縮した。牧野氏は、このデータセット開発の全体像と、現場で直面した課題への対応について語った。
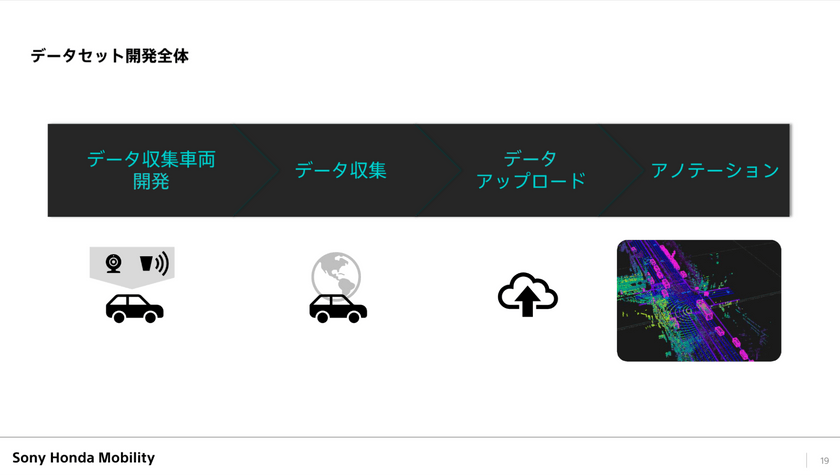
「AFEELA Intelligent Drive」のデータセット開発は、大きく4つのフェーズで構成される。データ収集車両の開発、実際の走行によるデータ収集、クラウドへのデータアップロード、そしてアノテーションだ。
【フェーズ1:車両開発】自前構築が実現した「非圧縮データ」と6カ月の驚異的スピード
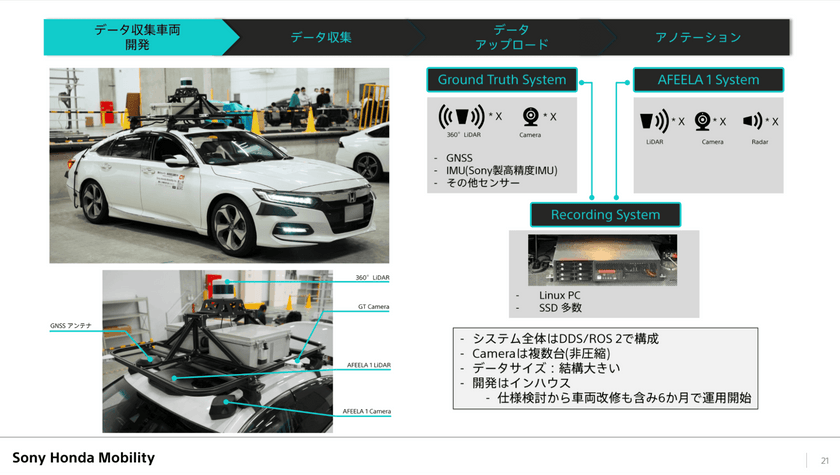
最初のフェーズであるデータ収集車両の開発では、ルーフキャリア上に360度LiDARやカメラ、高精度IMU(慣性計測装置)などを搭載した車両を自社で構築した。システムは3つに分かれている。より高精度にセンシングするための「Ground Truth System」、量産車両と同じセンサーレイアウトを再現した「AFEELA 1 System」、そしてこれらをつなぐLinux PCによる「Recording System」だ。
カメラは非圧縮でレコーディングしている。データサイズは大きくなるが、より高精細なデータを残すための選択だったという。開発は要求検討から車両改修、運用開始まで約6カ月で完了した。すべてをインハウスで行ったからこそ実現できたスピードだ。
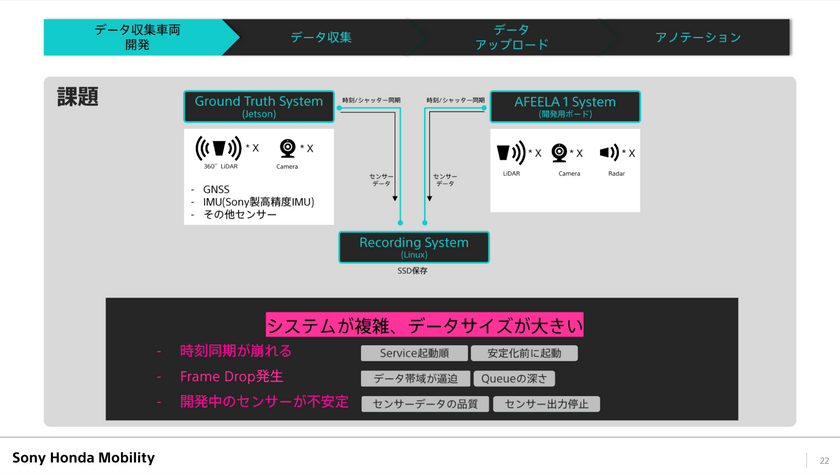
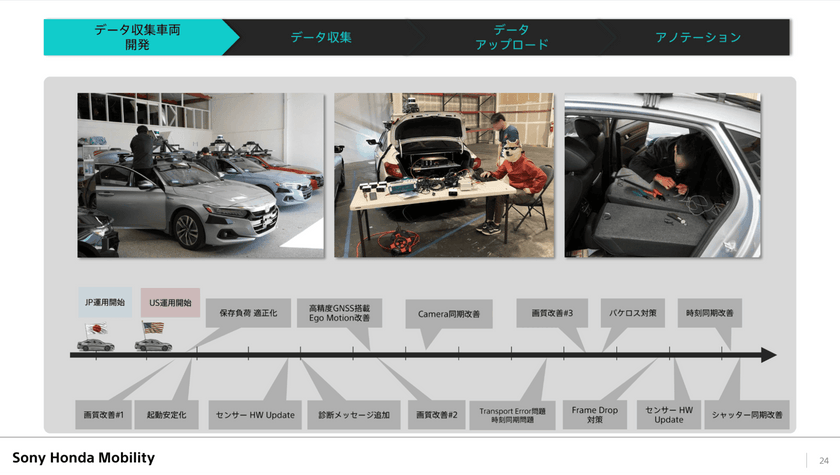
複数システムの連携と大容量データという組み合わせは、想定外の問題を次々と引き起こした。時刻同期の崩れ、フレームドロップ、開発中センサーの不安定な挙動。牧野氏によると、「運用を開始したものの、問題が発生するたびに開発・改善を行ってきた」という。
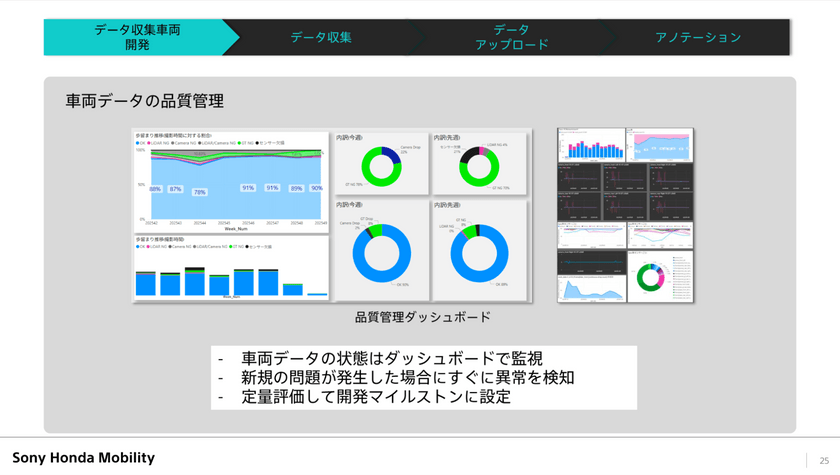
現場で問題が発生すれば、チームが直接駆けつけて修正する。配線作業まで自分たちの手で対応した。車両の状態を常時監視できるダッシュボードを構築し、異常を即座に検知できる体制も整えた。データの品質を定量化し、開発マイルストーンに設定することで、目標を持った素早い改善サイクルを回している。
【フェーズ2:データ収集】日米での実走と、異常を即座に検知する「現場主義」のUI
ここから牧野氏は、開発したデータ収集車両でのデータ収集に話を進めた。
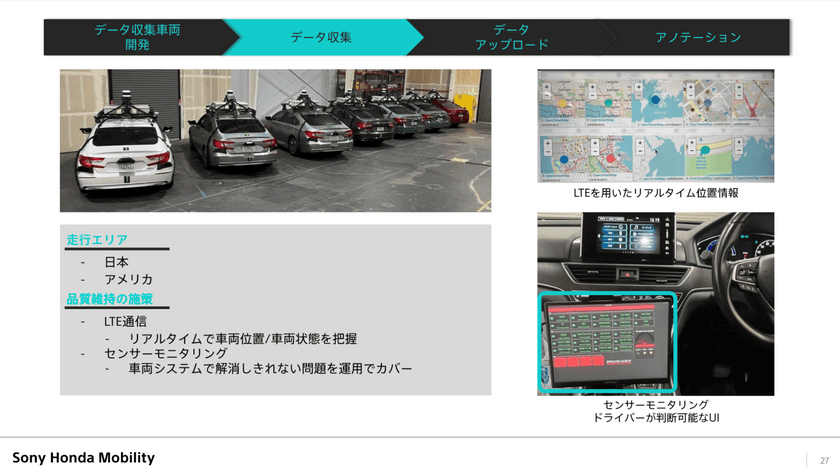
2025年現在、データ収集車両は、日本とアメリカで走行している。走行車の品質維持のための施策としては、LTE通信によるリアルタイムの位置情報や車両診断情報のアップロードで監視を行い、ドライバーが異常に気づけるようにするセンサーモニタリングUIも導入している。これらの仕組みは、開発やデバッグを重ねてもどうしても改善しきれない問題が現場では発生する、という前提に立ったものだ。
そうした問題を運用でカバーするため、車両が現在正常なのか異常なのかを即座に把握できるよう、センサーモニタリングの仕組みとUIを整備している。異常発生時にはドライバーがすぐに気づいて対応できるようにすることで、不正なデータを取り続けてしまう事態を防いでいる。
【フェーズ3:クラウドへのアップロード】非圧縮データの壁と物理配送の限界
ここから話は、ここまでで収集したデータのクラウドへのアップロードするフェーズへ。
データ収集における最大の課題は、膨大なデータをいかにクラウドであるAWSの「S3」へアップロードするかだった。非圧縮画像を含む大容量データは、通常のインターネット回線では運用が回らないサイズであるためだ。
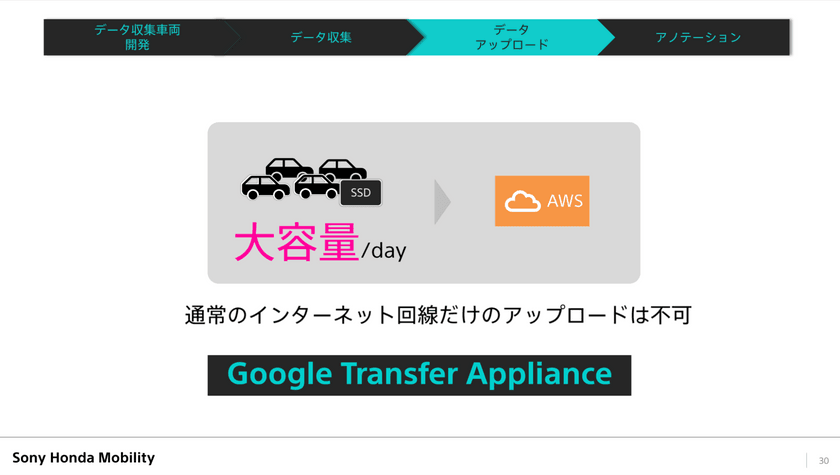
これに対して当初採用したのが「Google Transfer Appliance」だ。300TBのストレージを内蔵した専用装置にデータをコピーし、それをGoogleのサービスセンターへ配送することで、クラウド上にデータをアップロードしてもらう仕組みである。Webから発注するだけですぐに利用でき、かつ日本とアメリカの両拠点で同一のオペレーションを構築できる点が決め手となり、この方式が選ばれた。

一方で、実運用を重ねるなかで新たな課題も明らかになった。データのコピーや配送、クラウド反映までに複数の手順を要し、データが実際に利用可能になるまでには約2週間を要していた。また、装置自体のハードウェアトラブルも発生し、交換対応の間はデータ転送が止まってしまうケースもあった。「データに異常が発生していても、それに気づくまでに時間がかかってしまう点が大きな問題でした」と牧野氏は振り返る。

そこで同社は、データセンターとAWSを専用線で接続する「AWS Direct Connect」を利用した構成へと切り替えた。1回線あたり最大100Gbpsの高速通信が可能な専用線を活用し、データセンター内にラックスペースを確保。そこでデータ転送用のPCを設置し、走行後に回収したSSDを直接持ち込んでアップロードする運用へと変更した。
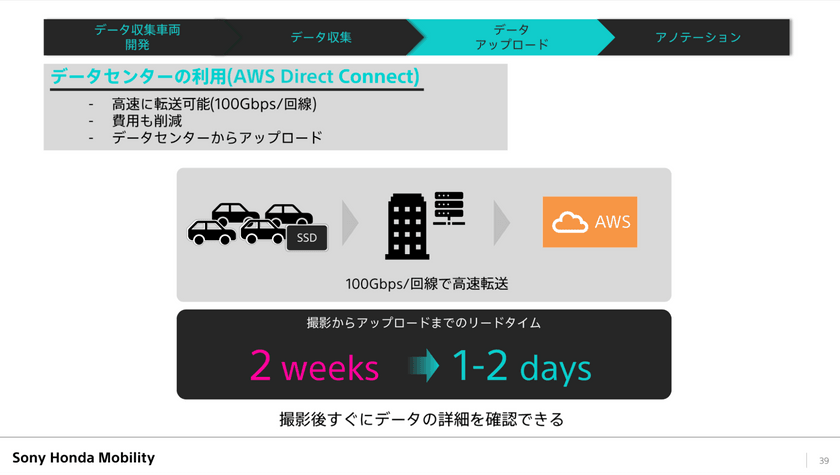
この見直しにより、データのリードタイムは従来の約2週間から1〜2日へと大幅に短縮された。撮影後すぐにデータの内容を確認できるようになったことで、異常や問題が発生した場合にも迅速に対応できる体制が整ったという。
【フェーズ4:アノテーション】ベンダー活用と内製チームによる厳格な品質管理の融合
アップロードされたデータは、モデル開発に利用するための最終工程としてアノテーション処理が行われる。
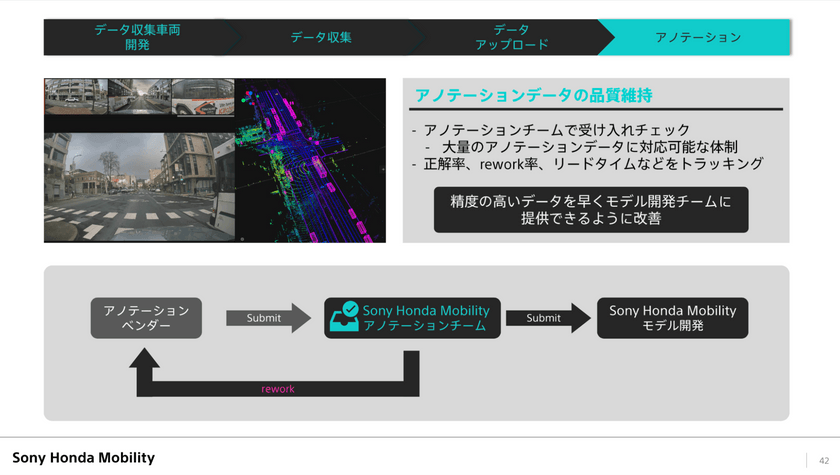
同社では、カメラ画像と点群データを組み合わせたアノテーションを実施しており、作業そのものはアノテーションベンダーに委託している。一方で、その品質を担保するための受け入れ判断は、社内のアノテーションチームが担う体制を取っている。
大量のアノテーションデータを安定して処理できる体制を整え、品質に問題が見つかった場合には、ベンダーへ差し戻して再作業を依頼する。正解率やリワーク率、リードタイムといった指標を継続的にトラッキングし、精度の高いデータをいかに早くモデル開発チームへ届けられるかの観点で、日々改善を重ねているという。
牧野氏が繰り返し語ったのは、意思決定と改善を自分たちの手元で完結させることの重要性だ。アノテーション作業そのものは外部と連携しつつも、品質判断や運用設計を内製で担うことで、問題が発生した際にも迅速に手を打てる。車両開発からデータ運用までを自前で回しているからこそ、このスピード感が実現できている。
データセット開発は、AI開発を支える地道な作業である。しかし、その品質とリードタイムが、最終的なシステム性能を大きく左右する。自分たちで作り、自分たちで直す──。その姿勢が、データを「2週間待つもの」から「1日で使えるもの」へと変えていった。
【第3部】AIモデル開発──データを「理解」へと昇華させる学習アプローチ
演者プロフィール
ソニー・ホンダモビリティ株式会社
オートノマスシステム開発部
AIモデル開発課
シニアマネジャー
周藤 泰広(すとう・やすひろ)氏
ソニー・ホンダモビリティ株式会社
オートノマスシステム開発部
NNプランナ課
山口 凜太朗(やまぐち・りんたろう)氏
データの壁を突破する:精度を落とさず学習を高速化する「ラージバッチ学習」の確立
第三部では、データを実際にどのようにAIモデルの学習に活用しているのかについて、ソニー・ホンダモビリティのAIモデル開発チームが説明した。
大量のデータを扱うAI開発において、多くの現場が直面するのが学習時間の長期化だ。ソニー・ホンダモビリティでも、データ量が増えるほどモデル精度は向上する一方で、学習にかかる時間が膨れ上がるという課題に直面していた。そこで同社は、バッチサイズを大幅に拡大しても精度を落とさない学習手法を確立し、継続的に学習効率を改善するアプローチを取っている。
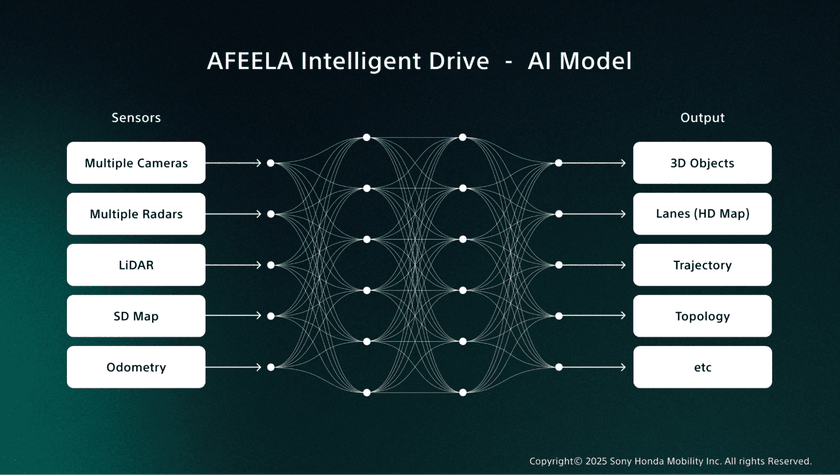
「AFEELA」には40個ものセンサーが搭載されている。カメラ、LiDAR、レーダーなど種類も多様だ。周藤氏によると、「AFEELA Intelligent Drive」のAIモデルの特徴は二つある。
一つ目は、センサーから得られる情報をできるだけ高品質かつ「素」に近い状態で入力すること。カメラは高画質・高解像度のまま扱い、LiDARやレーダーは前処理を最小限に抑え、ポイントクラウド(点群データ)の状態でモデルに入力する。
二つ目は、800 TOPS(※)という大きな計算リソースを前提に、その性能を使い切る大規模かつ高効率なモデルを設計している点である。
※TOPS:1秒間に実行できる演算回数を示す単位。800 TOPSは非常に高い演算性能を意味する
マルチモーダル融合の劇的な効果:カメラ単体比でレーン推定精度が40%向上
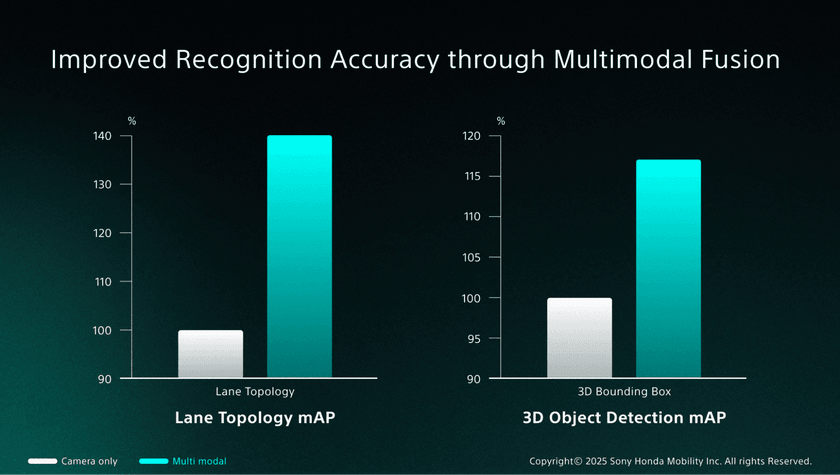
では、こうしたマルチモーダルな設計はどれほど効果があるのか。カメラ単体で処理した場合の性能を100%とすると、複数のセンサー情報を融合した場合、レーン推定で約40%、物体認識で約20%弱の精度向上が確認されたという。
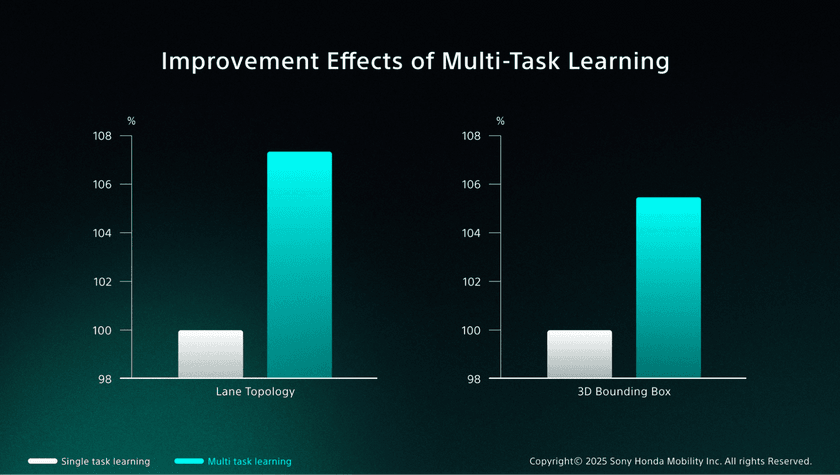
さらに、このモデルはレーンや標識、物体を個別に認識するだけでなく、物体間の関係性も推定する。例えば、信号がどのレーンに紐づいているかといった関係性までを出力する。こうした難易度の高いタスクを前提に、単一タスクではなく複数タスクを同時に解くマルチタスク学習を採用している点も特徴だ。実際、単体で学習するよりも複数のタスクを組み合わせた方が、7〜8%程度精度が向上する結果が得られている。
データ増加と学習時間のジレンマ:改善サイクルを停滞させないための戦い
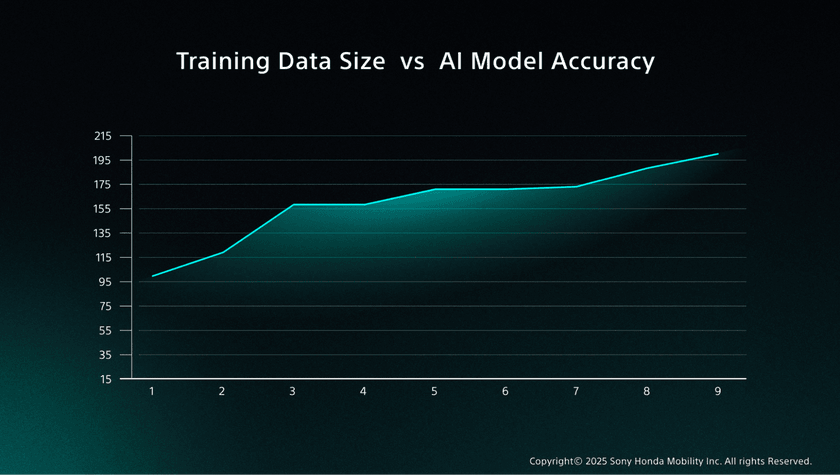
毎週のように新たなデータが追加され、モデル精度は右肩上がりで向上していく。しかし周藤氏は「データが増えること自体は良いが、その分学習時間がどんどん長くなってしまう」と課題を語る。学習に時間がかかりすぎると、改善サイクルが回らなくなり、モデルの進化スピードそのものが落ちてしまうからだ。
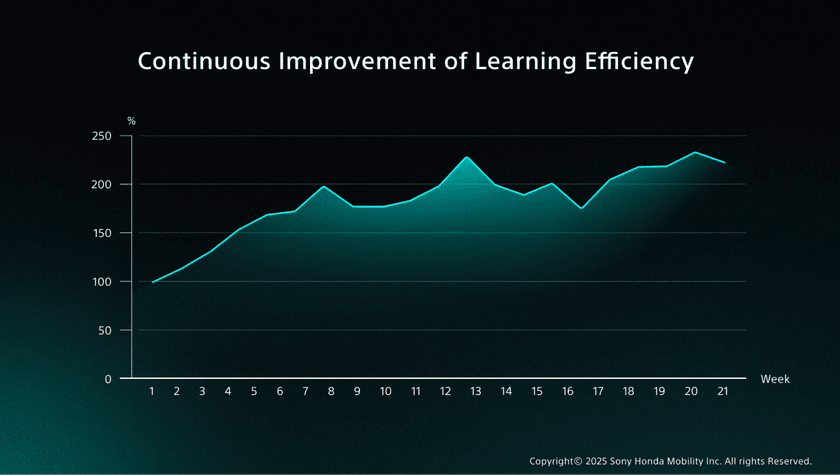
この問題に対して、チームは二つのアプローチを取った。一つは学習アルゴリズム自体の効率化だ。毎週少しずつ改善を積み重ね、モデルや学習方法を変更しながらも、全体としては学習効率を継続的に高めてきた。
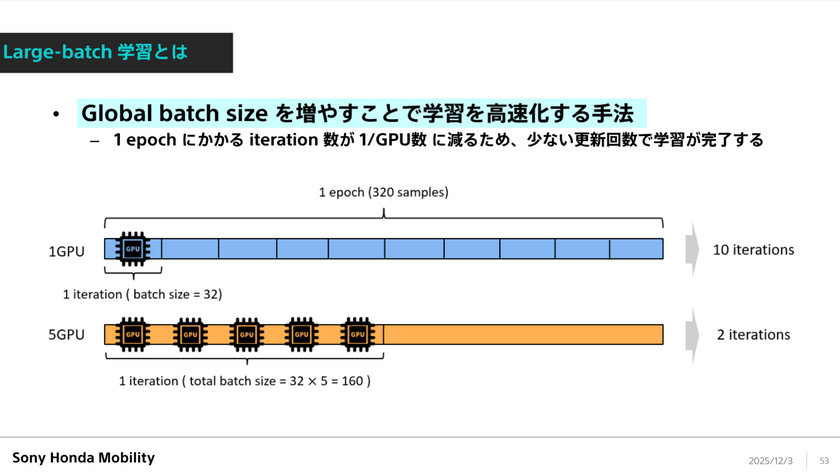
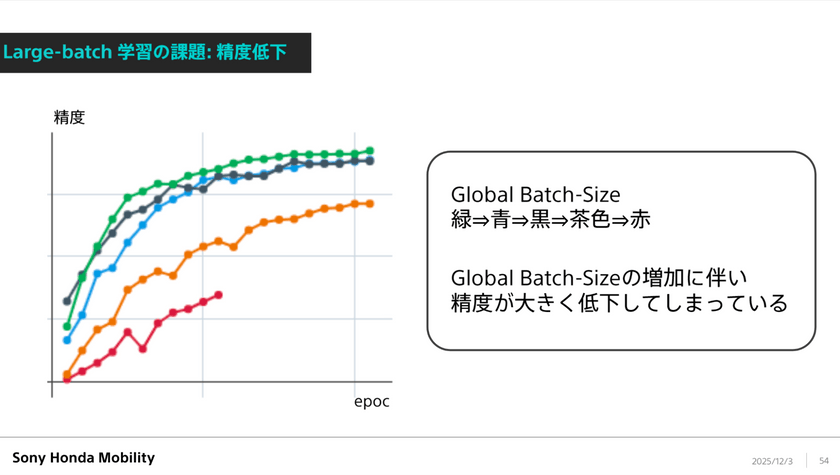
もう一つのアプローチが、GPUを大量に用いた大規模学習による学習時間の短縮だ。ここで問題になるのが「Large-batch学習」による精度劣化である。理論上はGPUを増やせば学習は高速化できるが、単純にバッチサイズを大きくすると、精度が大きく落ちてしまうことが知られている。
ラージバッチ学習を阻む2つの要因:局所解と探索不足の罠
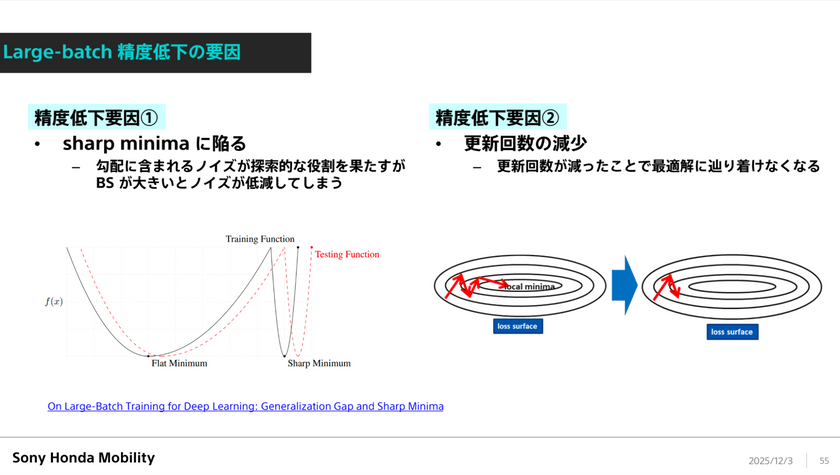
周藤氏によると、その原因は大きく二つある。最適解ではなく局所解に陥ってしまうこと。もう一つは、イテレーション回数が減ることで探索回数自体が不足する点だ。チームはこれらの課題に対し、探索方法を工夫することで、大きなバッチサイズでも精度劣化がほとんど起きない学習手法を確立した。これにより、大量のデータを高速に回す学習サイクルが実現している。
チームはこの問題に取り組み、「より賢い探索方法」を導入することで、バッチサイズをかなり大きく上げてもほとんど精度劣化がない学習方法を確立した。これにより、大量のデータを高速に回すサイクルが実現できている。
数個の点に「意志」を込める——「AFEELA」の知能を司るプランナー開発の深淵
周藤氏の講演に続き、第三部の後半ではプランナー開発を担当する山口氏が登壇した。
安全性と快適性を「運転意図」で解き明かすプランナーの挑戦
プランナーとは、AIが認識した周囲の状況をもとに、クルマが「どのような意図で」「どの経路を走るか」を決定するモジュールである。
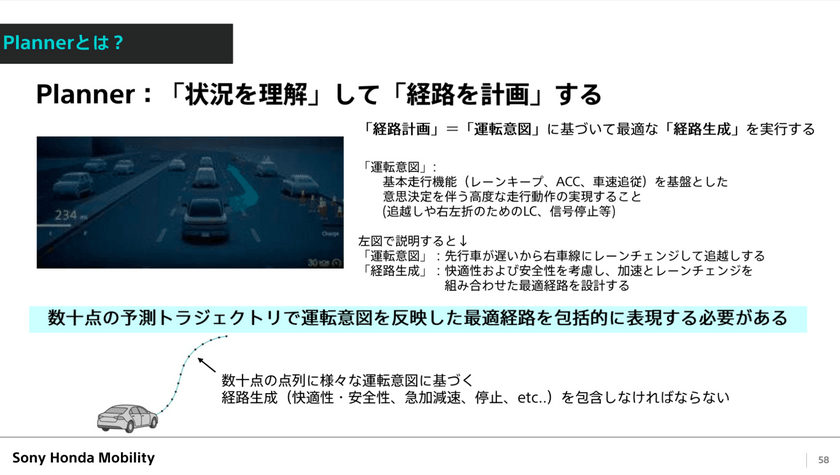
山口氏は、プランナーを単なる経路計画ではなく、「運転意図に基づいて最適な経路を生成するもの」と定義する。レベル2で実現されているACCやレーンキープといった基本走行機能を土台に、追い越しや車線変更、信号判断といった意思決定を伴う高度な運転動作を扱うのがプランナーの役割だ。
このプランナー開発で、山口氏が最も難しいと感じている点は、モデルが最終的に出力するのが数十点のトラジェクトリであることだという。限られた点列の中に、安全性や快適性、そして「なぜその動きを選んだのか」という運転意図までをすべて反映させる必要があり、包括的に表現することが非常に難しいと語る。
膨大なシミュレーションとクラウドが支える「人を超える」挙動の裏側
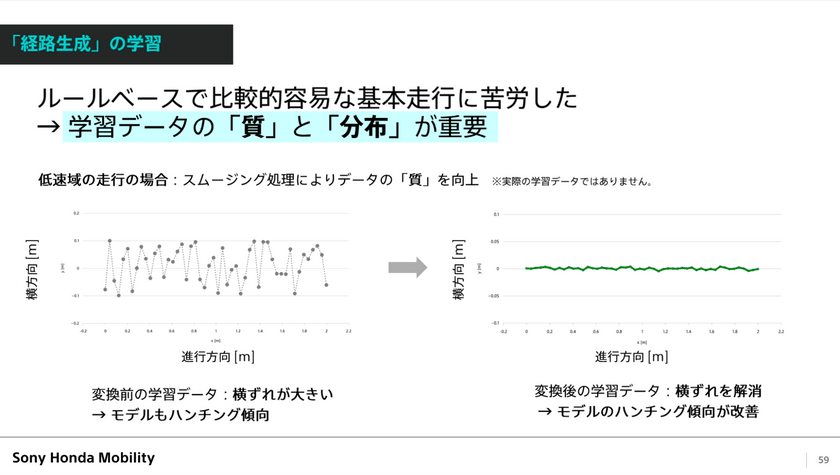
さらに課題となるのが、学習データの扱いだ。例えば低速走行時のデータを詳細に見ると、位置情報が数十センチ単位で不安定に揺れているケースがある。こうしたデータをそのまま学習に使うと、車両挙動が不安定になる原因となる。そのため同社では、前処理によって必要な部分だけを適切に平滑化し、データの質を担保した上で学習に用いる工夫を行っている。
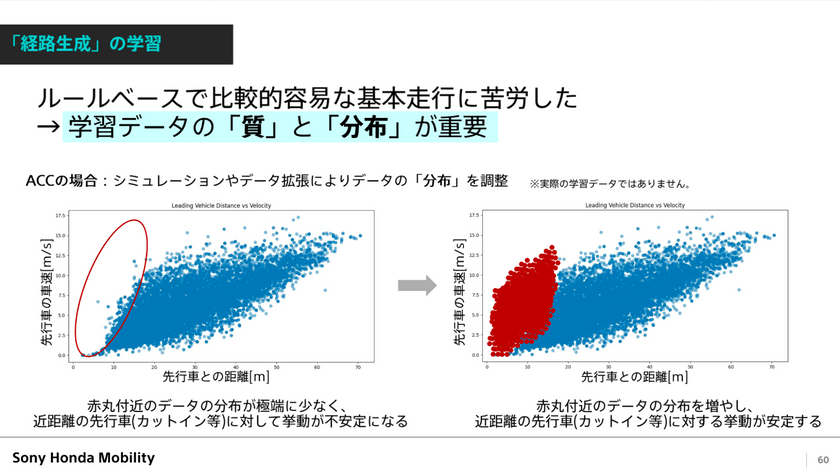
データの「分布」も重要な課題だ。実車で収集したデータでは、車間距離が極端に短いケースなど、学習に必要だが出現頻度の低い状況が不足しがちになる。そのまま学習すると、分布外の状況で挙動が破綻する恐れがある。こうした課題に対し、データ拡張やシミュレーションを活用して不足部分を補い、学習データの分布を整えているという。
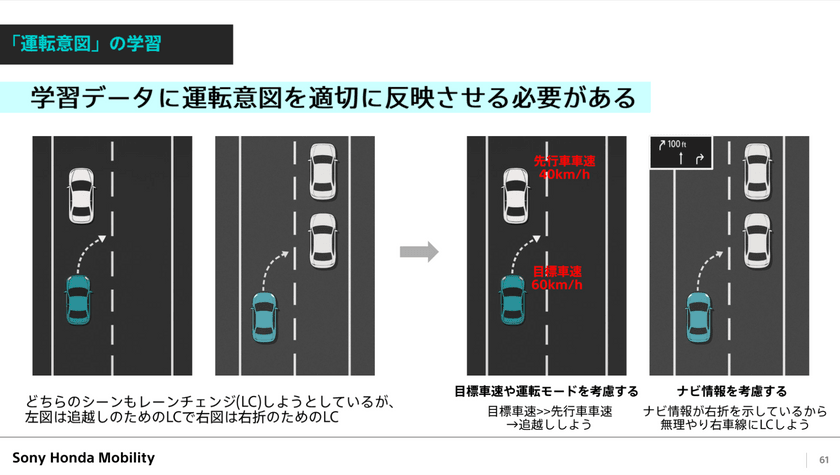
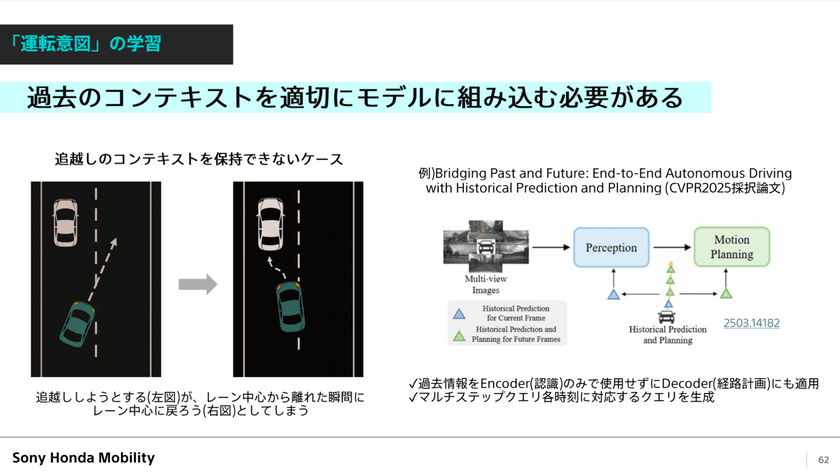
また、運転意図の学習も欠かせない。同じレーンチェンジであっても、追い越しのためなのか、ナビの指示によるものなのかで求められる挙動は異なる。さらに、過去の運転文脈を適切に考慮しなければ、途中で不自然な挙動に戻ってしまうこともある。こうした問題を防ぐため、運転意図やモード、過去のコンテキストを含めて学習するアプローチを取っている。
これらの学習と検証は、AWS上のクラウド環境で大規模に回されている。複数の学習ジョブを並列に実行し、シミュレーション環境で評価を行いながら、最も良いモデルを選び出し、実車検証へとつなげる。このサイクルを高速に回し続けることで、プランナーの精度を継続的に高めている。
【トークセッション】異業種の知恵が融合するとき、何が生まれるのか?4人の開発者が語る本音
トークセッションでは、登壇者4名が、講演で触れられなかった異業種融合のリアル、スピード感ある開発の秘訣、そして技術選定の哲学などについて率直に語られた。
設立から約2年半、ゼロから先進モビリティを生み出す現場で何が起きているのか。
⚫︎ソニー・ホンダモビリティならではのユニークネスとは?
山口氏:一番ユニークだと感じるのは、ホンダの車両開発に対する高い専門性と、ソニー株式会社(以下「ソニー」)のソフトウェア領域での強みが組み合わさっている点です。両者が混ざり合うことで、非常に良い相乗効果が生まれていると感じています。私は今年1月に入社し、現在はAIプランナーの開発を担当していますが、正直なところ、車両についてはまだ学ぶことが多い立場です。ただ、最終的に自分が設計した経路に沿って動くのは実際のクルマなので、その点ではホンダ出身のメンバーの知見が不可欠です。『この経路では実際には走れない』といった率直な指摘も日常的に交わされており、そうした議論を重ねるなかで、システムの完成度が着実に高まってきていると感じます。
山口氏:入社前は、ソニーと本田技研工業株式会社(以下「ホンダ」)という大きな組織同士がぶつかり合い、かなり緊張感のある環境なのではないかと想像していました。ただ、実際に入ってみると、もちろん厳しさはありますが、皆さんとても協力的で、雰囲気も良く、開発に集中しやすい環境でした。その点は、良い意味で想像と違っていましたね。
牧野氏:私が見ていてユニークだと感じるのは、データ収集の在り方です。車両そのものを自分たちで開発し、その車両で収集したデータを、自分たちで管理・運用しています。ここまでを一貫して内製しているケースは、技術的に見てもあまり多くないのではないかと思います。ソニー側、ホンダ側の両方から人材が集まり、車両、データ、クラウドまでを自前で扱える体制が整っている点は、大きな強みです。実際に現場で問題が起きた際にも、自分たちで作っているからこそ、すぐに現場に入り、迅速に対応できる。そのスピード感も、この体制ならではの価値だと感じています。
堀場氏:ソニーとホンダが組めば、新しいモビリティが簡単に生まれる、というイメージを持たれることも多いと思います。私自身も、会社設立当初はそうした期待を持っていました。ただ、実際は決して単純な話ではありませんでした。お互いに強い専門性とプライドを持っているからこそ、最初から順風満帆というわけではなく、社内の雰囲気が難しくなる時期も正直ありました。
堀場氏:ただ、そこで重要だったのは、共通の目的を明確にし、実際の課題を一緒に乗り越える経験を積み重ねていくことでした。リスペクトは、最初から自然に生まれるものではありません。クルマやソフトウェアを実際に形にし、課題解決の場面で互いの強みが活きる経験を通じて、少しずつ信頼関係が築かれていきます。そうした積み重ねの結果、今では非常に良い雰囲気で開発が進められていると思います。
⚫︎スピード感ある開発体制・プロセスを実現する工夫とは?
周藤氏:スピード感のある開発ができる状態は、多くの人が一度は経験していると思いますが、メンバー一人ひとりが自分の得意分野に自信を持ち、自律的かつ積極的に動けるようになると、自然とスピードは上がっていきます。基本的な考え方としては、特別な仕組みをたくさん作るよりも、まずは任せることが大切だと考えています。
周藤氏:一方で、各自が完全に自由に動きすぎると、全体として収拾がつかなくなってしまいます。そこで、最低限のルールや目安は設けています。例えば、3カ月・3週間・3日といった時間軸で区切りを設け、一定のタイミングで成果を振り返るようにしています。そうした共通のリズムを持ちながら、個々の自律性を尊重し、必要に応じてサポートしていく。そのバランスを意識した体制づくりが、スピード感のある開発につながっているのではないでしょうか。
⚫︎「AFEELA Intelligent Drive」の技術選定ポリシーとは?
堀場氏:技術選定ポリシーを一言で説明するのはなかなか難しいのですが、象徴的な例として、2023年の発表時に800 TOPSの高性能SoC(System on Chip)を採用すると表明したことが挙げられると思います。当時は、その計算性能を具体的に何に使うかがすべて決まっていたわけではありません。それでも、非常に高いスペックのSoCを前提として選択していました。
堀場氏:正直に言うと、私自身はシステム設計を専門としてきた人間で、これまでは性能やコスト、将来性のバランスを取る、いわば“最大公約数的な設計”を得意としてきました。ですから、最初に800 TOPSという数字を見たとき、『それを何に使うのか』と考えてしまい、『後から進化させて活用します』という説明をしたところ、かなり厳しく指摘されました。その経験を通じて、従来の発想を大きく切り替えなければならないと強く感じました。何に使うかを先に限定するのではなく、将来の可能性に賭けて計算リソースを確保する。そうした考え方を実際に目の当たりにしたことは、非常に印象に残っています。
周藤氏:技術選定の考え方には、AIならではの要素と、それ以前から変わらない要素の両方があると考えています。まず共通して言えるのは、機能の品質を高めようとすると、どのアプローチを取っても、結局は“十分な計算リソース”と“高品質な入力データ”が重要になるという点です。ソニー・ホンダモビリティでは、そのどちらについても、妥協せず高い品質を選択しています。SoCについては、その時点で最も高い性能を持つものを採用し、センサーについても、カメラの画質やLiDAR・レーダーのポイントクラウドの品質が高いものを選び、それをできるだけ“素のまま”使う。こうした選択は、技術選定における大きな特徴だと思います。
周藤氏:もう一つの特徴は、AI開発ならではの姿勢です。「できるだろうか」と感じることでも、実際にやってみると意外に実現できるケースは少なくありません。もちろん、データ準備などの負荷が大きく、躊躇してしまう場面もありますが、それでも必要だと判断すれば、まずはトライしてみる。その姿勢を大切にしています。こうした「やってみる」という考え方は、個人の意欲だけでは成立しません。データを新たに用意し、システムを構築して検証するには、組織全体として挑戦を許容するマインドが必要です。その点で、ソニー・ホンダモビリティには、組織としてチャレンジを後押しする文化があると感じますね。
【Q&Aセッション】
Q&Aセッションでは、登壇者4名がイベント参加者から投げかけられた質問に回答した。
Q. ブランディングやコンセプト構築もエンジニアで行ったのですか?
堀場氏:私たちはエンジニアとしてADASの開発に携わっていますが、ブランディングやコンセプト設計そのものを、エンジニアが担っているわけではありません。ソニー・ホンダモビリティのなかには、ブランディングやデザイン、プロダクトやサービスのプランニングを担当するチームがあります。パーパスやブランドアイデンティティ、コンセプト、コアバリューといった部分は、そうした専門家が中心となって策定しています。私たちは、その考え方に共感した上で、エンジニアリングの立場から実現に向けた開発を進めている、という役割分担です。
Q. センサーが多いと分析処理に時間がかかり、運転支援のアウトプットが遅れるなどの問題は発生しませんか?
周藤氏:非常に重要な課題です。「AFEELA」はセンサーの数が多く、処理すべきタスクも多いため、推論時の遅延や学習時間の増大といった問題が常に発生します。推論時の遅延については、Qualcomm Inc.(以下「クアルコム社」)と密に連携しながら取り組んでいます。「AFEELA」ではクアルコム社のチップを採用しており、クアルコム社のエンジニアと日常的にやり取りしながら、我々自身も最適化に入り、より効率的に処理できるよう改善を重ねています。
Q. 「Google Transfer Appliance」を使ってGCP経由でAWSにアップロードしていましたが、「AWS Snowball」を使わなかった理由は?
牧野氏:今回は運用面での課題があったからです。大量のデータを継続的にアップロードするには、「AWS Snowball」をかなりの台数確保する必要がありますが、その入手性に不安があり、途中で途切れてしまう可能性がありました。AWS側とも相談し、今回は採用を見送り、別の方法を選択しました。
Q. AIモデルが多様な状況やデータを正しく理解し、予測や運転を行っているかは、どのように評価していますか?
山口氏:すべての状況を網羅的にテストすることは現実的には難しいため、まずは机上で、こちらが用意したさまざまなシナリオを使ったシミュレーションで評価を行います。そのなかで最も良い結果を出したモデルを、最終的に実車に搭載して検証します。このシミュレーションと実車テストのサイクルを非常に速く回しており、シナリオの拡充や実車テスト手法の改善も並行して進めることで、評価の精度を継続的に高めています。
Q. ホンダのクルマづくりや、ソニーのエンターテインメント製品とのシナジー、差別化についてはどのように感じていますか?
堀場氏:従来の自動車開発では、それぞれのメーカーが自社の技術を軸に“世界初”や“世界一”を目指すケースが多いと思います。一方でソニー・ホンダモビリティでは、最初から「クルマを通じて新しい体験を届ける」という発想が出発点にあります。その文脈では、ソニーが長年培ってきたエンターテインメント領域の知見は非常に親和性が高いと感じています。車両技術とエンターテインメントを切り離して考えるのではなく、どのような体験価値を提供できるのかを一体となって考えられる点が、この会社ならではの強みです。
文=宮口 佑香(パーソルイノベーション)
※所属組織および取材内容は2025年12月時点の情報です。
AFEELA 公式ウェブサイト
https://www.shm-afeela.com/ja/
ソニー・ホンダモビリティ株式会社の採用情報
https://www.shm-afeela.com/ja/careers/
ソニー・ホンダモビリティ株式会社の求人情報
https://hrmos.co/pages/sony-honda-mobility
おすすめイベント

関連するイベント





