デンソーが挑む「交通事故ゼロ」を目指す、最新危険検知技術開発事情【DENSO Tech Night 第三夜】
デンソーのソフトウェア領域における取り組みや技術活用の舞台裏を語る「DENSO Tech Night」。3回目となる今回のテーマは、「現実世界の”見えないリスク”を可視化せよ─画像認識による危険検知/VLMで拓く予兆検知」。現実世界の不確かさと向き合いながら、デンソーのエンジニアたちは、どのような技術を駆使して交通事故死亡者ゼロの世界を目指しているのか。4人のエンジニアがデンソーの危険検知技術開発の最前線を紹介した。アーカイブ動画
デンソーの技術開発のリアルな悩み?
株式会社デンソー
セーフティシステム事業部
セーフティシステム技術1部部長
稲田 純也(いなだ・じゅんや)氏
最初に登壇したのは、2023年からAD/ADASの次世代システム開発を統括している稲田純也氏。
稲田氏がまず紹介したのが、デンソーの「Mobility Well-being」というビジョン。このビジョンは大きく4つの要素で構成されている。第1は「あらゆる人に移動革新を」。多様な状況においても、信頼性のある移動の手段を提供することだ。第2は「無限のアイデアをかなえる移動空間を」。「これは運転する喜びを技術で最大化することでもある」と稲田氏。第3は「交通事故のない世界を」。これは同社に限らず、自動車に関わる企業は皆思っていることである。第4が「自由に移動できるよろこびと環境保護の両立を」。環境負荷を削減することにもしっかりと取り組んでいくということだ。
「私たちセーフティシステム事業部は第3の要素を達成すべく、究極の目標である交通事故死亡者ゼロを目指して活動しています」。(稲田氏)
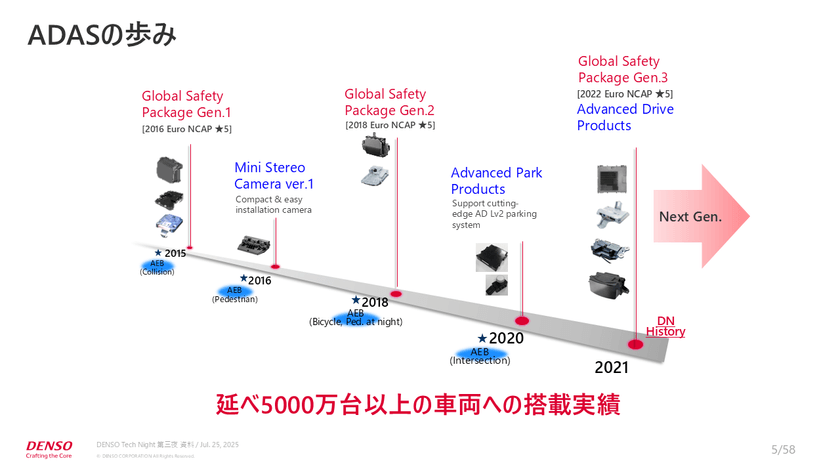
デンソーが初めてADAS「Global Safety Package」をリリースしたのは2015年。稲田氏は「この最初のモデルに搭載された物体認識技術の研究開発から量産までを担当しました」と話す。その後、第2世代、第3世代のADASを世に出し、現在はさらに次世代モデルの開発を進めている。「これまでにのべ5000万台以上の車両に当社の技術が搭載されている。安全に貢献できていると嬉しい」と稲田氏は語る。
ADASが搭載されている自動車は、さまざまな環境で使われる製品である。「たとえば砂漠など灼熱の状況でも、夜間かつ雨天のなかでも正しくADASが動作する。そういう考えで製品を開発している」と稲田氏は語る。

最新のADASは大きく2つの方向性で開発が進められている。一つは信頼性を高めること。自動車専用道でのハンズオフ運転(自動運転レベル3)の実現である。
「ドライバーが目を離してもシステムが責任を持ってクルマを動かすようにすることが、ADASを進化させる一つの大きな軸になっている」。(稲田氏)
もう一つは対応力。「私たちは[レベル2++]と呼んでいますが、一般道での直進や右左折を含めて、目的地まである程度システムが主体性を持って目的地までの運転支援を実現していくこと」と稲田氏は言う。
従来までのルールベースでは設計通りに動作するため扱いやすさがある一方で、すべてエンジニアがコードで記述する必要があるため、「市街地をはじめさまざまな環境に対応するには限界がある」と稲田氏は指摘する。一方、AIであればさまざまな状況に対応可能だが、動作に対して説明ができない、いわゆるブラックボックスになってしまうという課題がある。
このような技術的に悩ましい面はあるものの、「ディーラーの担当者から、『デンソーの製品のおかげで事故を起こさずに済んだ』という話を聞くたびに、安全に貢献できてよかったという想いが溢れる。それがADAS開発に携わる楽しさになっている」と稲田氏は語り、セッションを締めた。
駐車場での安心安全を世界中に!見えない危険を回避する自動駐車向け画像認識技術
株式会社デンソー
セーフティシステム事業部
セーフティセンサ&コンポーネント技術1部室長
二反田 直己(にたんだ・なおき)氏
続いて登壇したのは、2020年よりセーフティセンサ技術1部室長として、自動駐車向けの画像認識開発を統括している二反田直己氏。
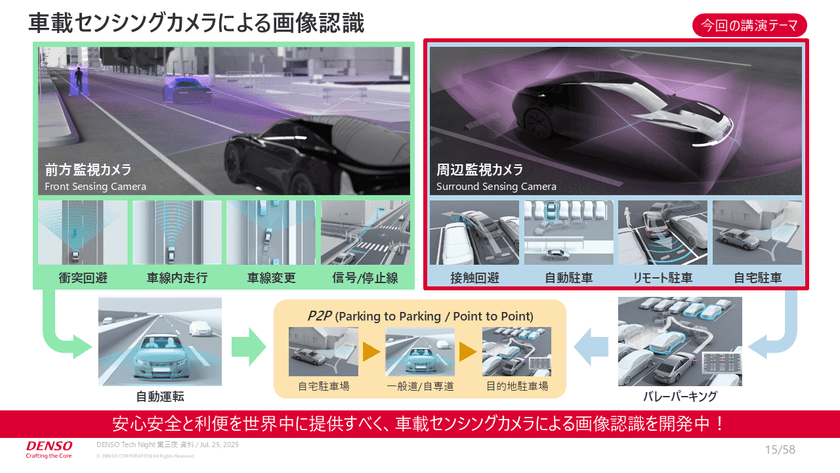
まずは車載カメラの説明から。車載カメラは大きく前方カメラと周辺カメラにわかれる。前方カメラは衝突回避や車線内走行など、自動運転につながる技術。一方、周辺カメラは、低速走行時に起きる接触回避や自動駐車など、自動バレーパーキングにつながる技術である。
「これらの技術を組み合わせると、P2P(Parking to Parking / Point to Point)という技術につながります」。(二反田氏)
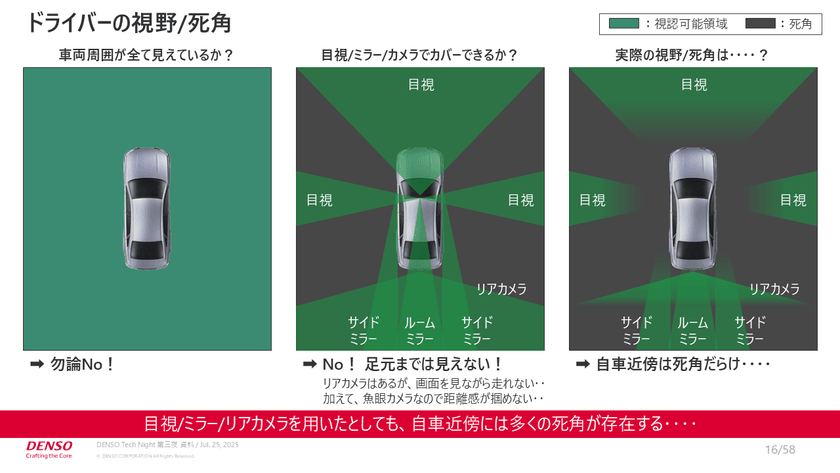
今回、二反田氏が取り上げたのは、周辺カメラ。クルマを運転するとわかるが、ドライバーは車両周囲がすべて見えているわけではない。窓から顔を出さない限り、足元は見えないし、リアカメラ※が付いていても「リアカメラは魚眼レンズで歪んだ画像なので、距離感が掴みづらい」と二反田氏。
※リアカメラとは
クルマの後方を映し出し、運転席のモニターに映像を映すことで、後退時の安全確保や死角の軽減を支援する装置
このように「自車近傍には多くの死角が存在する」と二反田氏は言う。とくに小さな子どもやラバーポールなど、高さの低いものは極めて認識しにくい。「駐車場にはそういう視認しにくいものが数多く存在する」(二反田氏)
自動駐車では「駐車枠検知」「静止物検知」「移動物検知」の3つの検知技術が使われる。
駐車枠検知は、左右前後4カ所に搭載された魚眼カメラの画像から、クルマの真上から見下ろしたような鳥瞰画像を作成し、その画像に対してAIで駐車枠を検知するという技術。AIが検知した場所に自動駐車していくということになる。
静止物検知とは、駐車場にあるさまざまな物にぶつからないように検知する技術。難しいのは、「形状や種別など関係なく検知する必要があること」と二反田氏。デンソーではセマンティックセグメンテーションに加え、SfM(Structure from Motion:単眼移動ステレオ)というカメラだけで周囲の3次元の形状を再構成していく技術を使って、周囲の生物を検知しているという。
駐車場には人など、移動している物もある。それらを検知するのが、移動検知と呼ばれる技術だ。「AIを使って、ショッピングカートを押している人を検知して、危ないときには車両を止めることを行っています」。(二反田氏)
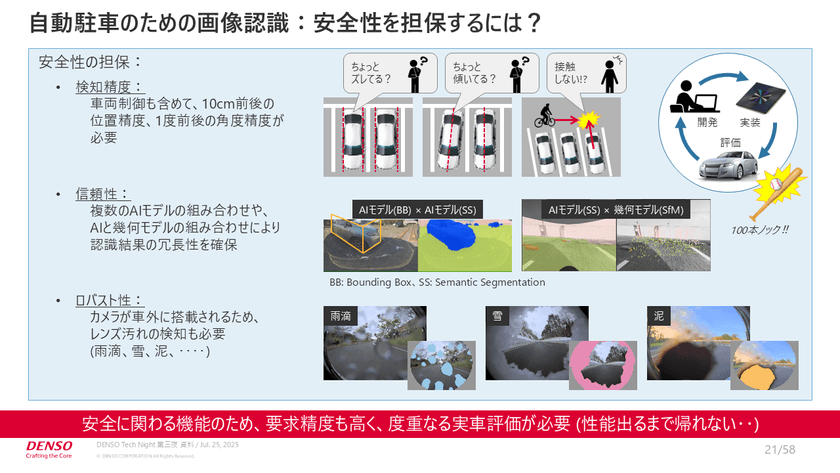
このような技術を用いて自動駐車を実現しているのだが、当然、安全性の担保は欠かせない。その一つが検知精度。車両制御も含めて10cm前後の位置精度、1度程度の角度精度が必要になってくるという。
「これが開発終盤で担保できないとなると、テストコースにカンヅメになってアルゴリズム開発をして即実装、即実車で評価するということを100本ノック的にやっていくこともあります」。(二反田氏)
2つ目は信頼性。「複数のAIモデルの組み合わせやAIと画像幾何モデルの組み合わせによって、認識結果の冗長性を確保し信頼性を担保しております」(二反田氏)
3つ目はロバスト性。魚眼カメラは車外に付いているので、当然雨滴や雪、泥などの汚れがついてしまう。これらを検知して今の認識結果が信頼できるものかどうかをケアしながら、システムとして完成していくことが求められる。「要求精度が高いので、度重なる実車評価が必要な開発になっている」と二反田氏は話す。
安全性の向上だけではない。商品性の向上も不可欠だ。駐車場は色々な線で駐車位置が描かれている。海外では、線ではなく色で駐車位置が分けられているところもあるという。また壁、ポール、段差、フラップ板、パーキングロッカーなどの静止物、さらに人に加え二輪車やキックボード、ベビーカー、おもちゃ自動車などさまざまな移動物など、情報にばらつきがあっても、同じ性能、同じ機能が求められる。
現在同社ではエキストラに協力を得て自動駐車を実現するためのさまざまなデータを採るほか、CGや画像校正も駆使しているという。
「大変なことはありますが、私たちは駐車場での悲しい事故をなくすために、駐車が苦手な人でも安心して出かけられるように、そしてすべてのドライバーの運転体験をすばらしいものにするために、画像認識技術開発を邁進していきます」。(二反田氏)
目だけでは見えないリスクを発見!車両の周辺環境を高精度に認識するためのセンサフュージョン開発
株式会社デンソー
セーフティシステム事業部
セーフティシステム技術1部
野場 悠佑(のば・ゆうすけ)氏
3番目に登壇したのは、次世代AD/ADAS向けの企画業務を経て、次世代センサフュージョン開発や自動運転向けの認識アルゴリズムの先行開発を担当している野場悠佑氏。
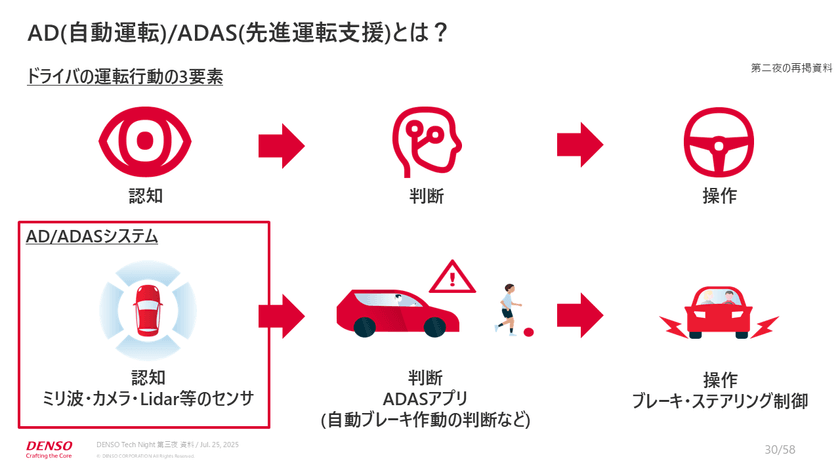
ドライバーの運転行動は「認知」「判断」「操作」の3要素で構成されている。具体的には目や耳を使ってクルマの周辺を認知し、その情報をもとにブレーキをかける、ステアリングを切る、などの判断をする。最後に手や足を使ってクルマを操作するという流れになる。
AD/ADASシステムでは、この流れのすべて、もしくは一部をシステムが担って実施する。センサフュージョンとは、複数のセンサのデータを統合し、より正確な状態を計測する技術。「運転行動の認知の部分に活用する技術」と野場氏は説明する。
世の中ではカメラによる画像認識が主流となっており、デンソーでも長年、開発されてきた。近年は、周辺車両や信号の色、車線などを高精度に認識できるようになっている。
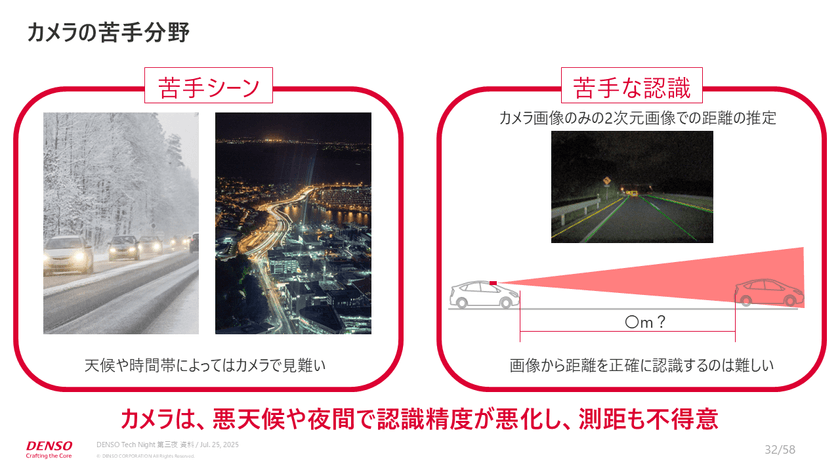
「とはいえ、カメラには苦手分野もある」と野場氏。一つは人と同様、カメラも雨や雪などの悪天候や、夜間などでは認識しづらくなる。また距離を認識するのも苦手な分野だ。
「こういった苦手なシーンの認識も、デンソーのスペシャリストが日々開発することでどんどん高性能になっている。とはいえ交通事故死亡者ゼロを目指すにあたって、各苦手分野を補い合う」というのがセンサフュージョンのアプローチである。
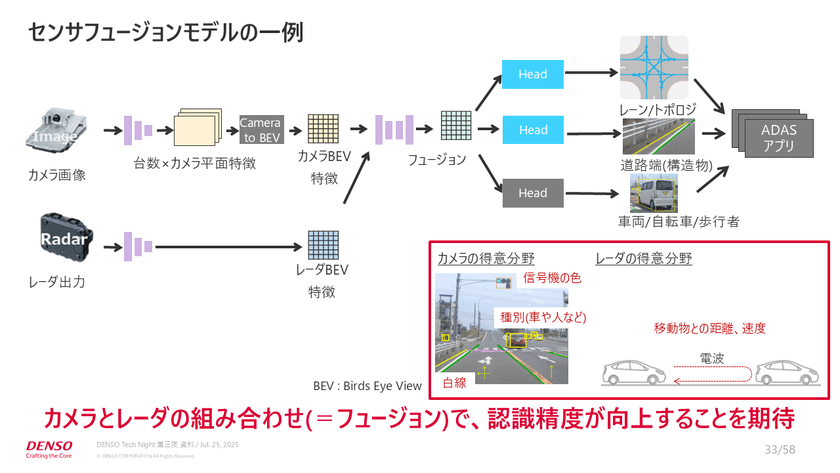
一例として野場氏が紹介したのがカメラとレーダの組み合わせ。カメラの得意分野は信号機の色やクルマや人の種別、レーンの認識。一方のレーダは移動物との距離や速度の認識が得意で、悪天候や夜間などの環境にも左右されにくいという特徴がある。
「このように各センサのいいところを組み合わせ、苦手な分野を補完していくことで、認識精度を向上させるのがフュージョンの考え方です」。(野場氏)
センサフュージョンによってどの程度精度が向上しているかを示す画像も紹介。画像は試作用としてスモールデータセットで学習したもの。「今、製品化されているものはさらに高精度になっている」と野場氏は言う。
交通事故死亡者ゼロを目指すには、路上落下物や救急車など、レアケースと呼ばれる珍しいシーンにも対応していかなければならない。「レアケースに対応させるためには、モデルにそのシーンを学習させなければなりません。実環境のみで珍しいシーンのデータを収集するのは難しい」と野場氏は開発の大変さを語る。
そこで同社ではカメラやレーダなど複数のセンサを出力できるシミュレータを活用。レアケースの再現を試みたところ、再現できることが確認できたという。
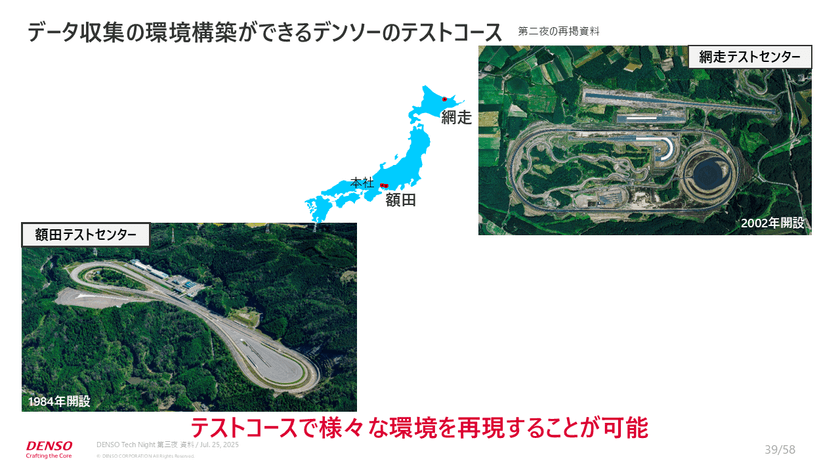
さらにデンソーではデータ収集の環境構築ができる2つのテストコースを活用。
「これらのテストコースでさまざまな環境を再現しながら、シミュレーションの結果と比較することで、フュージョンの開発に役立てていくことを考えています」。(野場氏)
カメラ画像内のリスクを先読みせよ!生成AIの設計・評価・エッジ組み込みで目指す、「熟練ドライバーレベルの安全運転」
株式会社デンソー
セーフティシステム事業部
セーフティシステム技術1部
担当係長
鷹野 翔(たかの・しょう)氏
最後に登壇したのは、次世代ADAS製品の開発に従事しているセーフティシステム事業部セーフティシステム技術1部担当係長の鷹野翔氏。
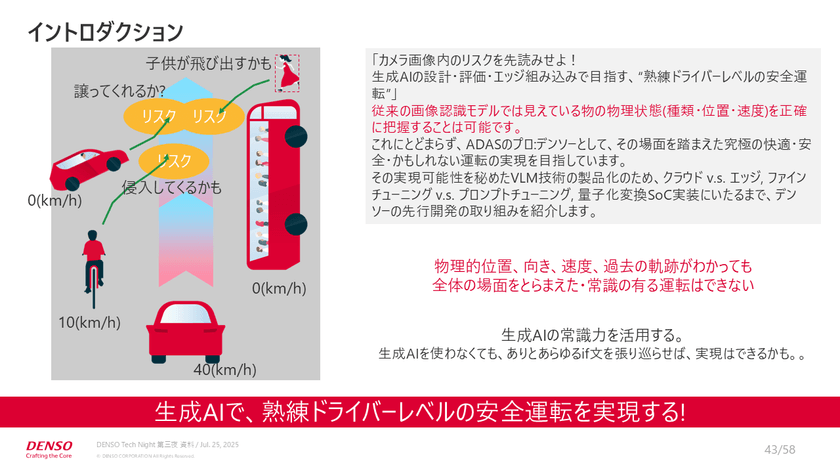
「従来の画像認識モデルでは見えている物の物理状態を正確に把握することは十分可能です。ただし、全体の場面をとらまえた常識ある運転はできないと思っています」と鷹野氏は言う。
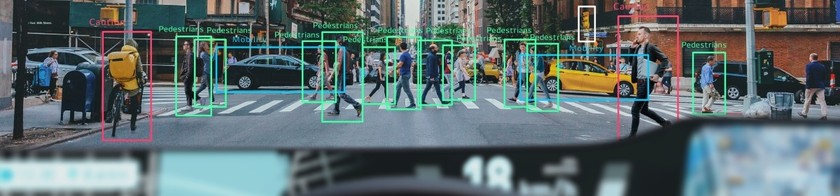
たとえばスライド「イントロダクション」にある図のケースの場合、左側の自転車が目の前に侵入してくるかもしれないし、左のクルマは譲ってくれないかもしれない。右側に停まっている観光バスの先には子どもがいて、飛び出してくるかもしれない。
このような状況に対応するため、鷹野氏は「生成AIで熟練ドライバーレベルの安全運転を実現しようとしている」と語る。
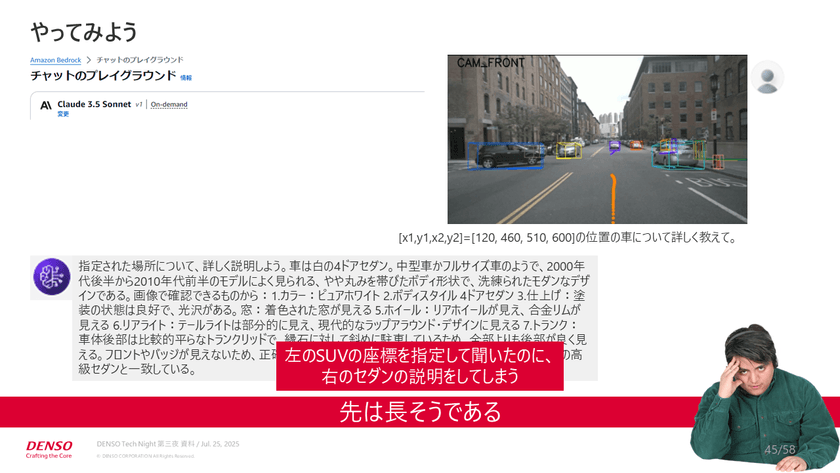
まず鷹野氏は、「Claude 3.5 Sonnet」に画像を入力し「この位置のクルマについて詳しく教えて」とたずねた。すると「左のSUVの座標を指定して聞いたのに、右のセダンの説明をしてしまった。先は大分、長そうだと思った」と鷹野氏は振り返る。
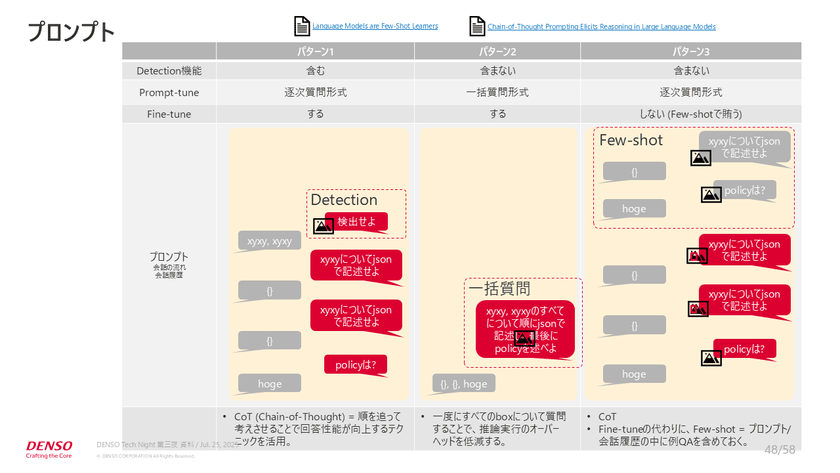
そこでタスクを「もう見えているもの(顕在リスク推定)」と「まだ見えていないもの(潜在リスク推定)」に分割。
たとえば顕在リスクでは、
- 参照表現:合流する黒いクルマ
- クラス:譲る
- 理由:交差点に進入し、対向クルマの進路を妨げているため
という言葉を生成させる。
そして画像全体の運転ポリシーは「左側から合流するクルマに道を譲ってくださいというタスクを解いてください」という設計にしたのである。
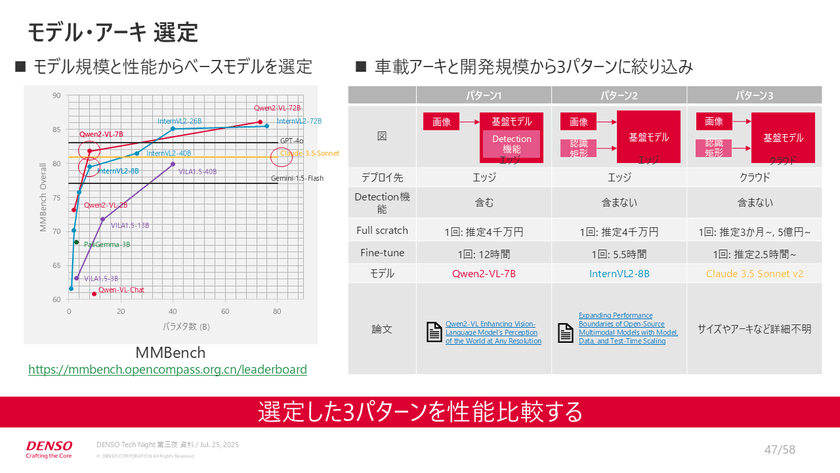
次に行ったのはこのタスクを解く生成AIの選定だ。鷹野氏は画像認識ベンチマーク「MMBench」を使い、さまざまな生成AIをモデル規模と性能を比較。
「Qwen2(パターン1)」「InternVL2(パターン2)」「Claude 3.5 Sonnet(パターン3)」の3つのモデルに絞り、性能比較を行ったという。
その結果、パターン1とパターン2、パターン3ともに認識精度はまだまだだが、定性評価はそれなりにできたという。
だが、定量評価をしようとしたところで問題が発生。意味は合っているのに性能が低かったからだ。原因は、意味は合っているが表現が違っていたこと。これまでは論文に従い、「CIDEr」という連続する単語の出現頻度を元に評価するアルゴリズムを採用していた。同指標には、語順の変化に対応できない・単語の言い換えに対応できない・単語の意味を評価できない・文章を評価できない、という課題があった。
そこでN-gramベースの課題を解決すべく登場したBERTScore※1を採用。これによって単語の意味的類似度を計算することができるようになったが、文全体の意味を考慮しているわけではなかった。
※1:BERTScore
BERT※2などのモデルを用いて文間の類似性のスコアを出力するタイプの評価指標
※2:BERT(Bidirectional Encoder Representations from Transformers)とは
Googleが開発した自然言語処理のための深層学習モデル。言語理解タスクを実行することができ、文の意味や文脈を理解することができる。
この課題を解決するために提唱されたのが、RAGなどで活用されているSentence-BERT※3である。「RAGを参考に、単語の意味、文意を評価可能にするメトリクスを採用することにしました」。(鷹野氏)
※3:Sentence-BERT(SBERT)とは
BERTモデルを基盤とし、より高精度な文章の埋め込みベクトル(意味を数値化したベクトル)を生成するためにファインチューニング(微調整)したモデル
こうして良い評価指標は得られたが、今度は「自然言語の目標値とは何なのか」という問題にぶつかった。頭を悩ませて着眼したのは自然言語の豊富な学習データにすること。
「同じ画像に対して5人別々にアノテーションしてもらいました」。(鷹野氏)
そして5人のアノテータのばらつきから目標値を策定し、人間同等を目指すことを思いついたのである。
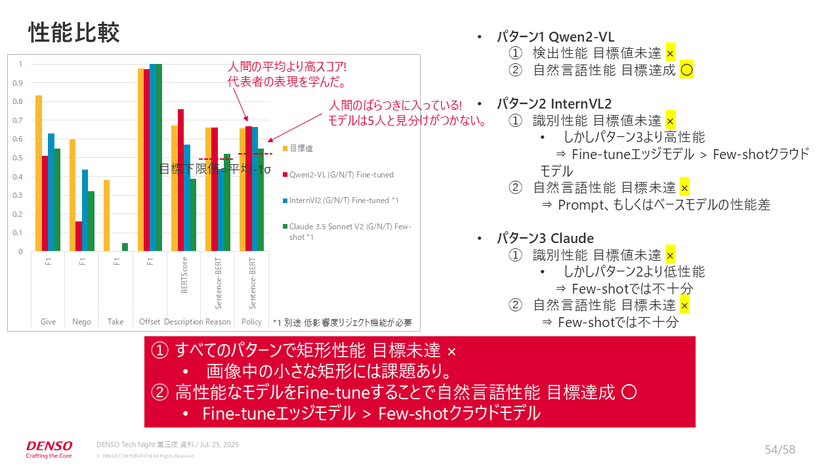
これもパターン1、パターン2、パターン3で性能を比較した。するとSentence-BERTではパターン1が人間の平均より高スコアとなった、「代表者の表現を学んだと考えられる」と鷹野氏は言う。
残念ながらすべてのパターンで矩形性能は目標を達成することはできなかったが、高性能なモデルをファインチューンすることで、自然言語性能は目標達成ができたという。
「開発PCとGPUで動かせただけではまだまだ。車載SoCのバジェット内で推論する必要がある」。(鷹野氏)
そこで量子化変換して処理速度を実測することにしたという。
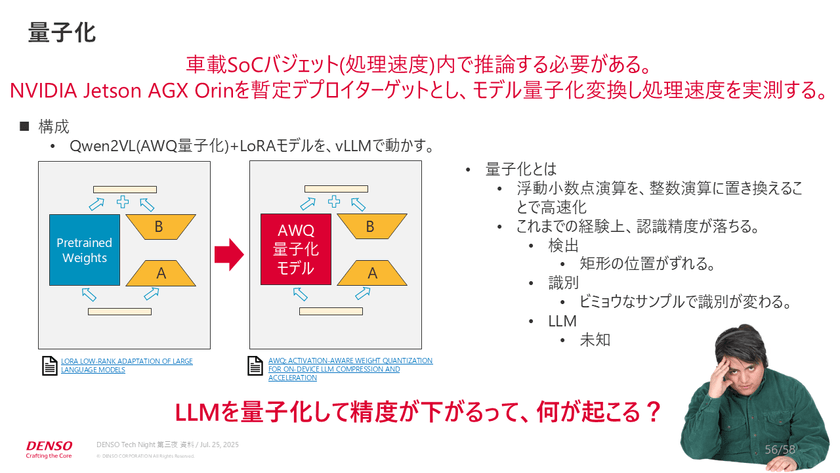
これまでの経験上、量子化すると認識精度が落ちることは予測していた。だがLLMでどんなことが起こるかは未知で、「エンジニアとしては楽しみだった」と鷹野氏は言う。結果は「中国語が出てきた」とのこと。
今回の検証では処理速度は向上したが、仮目標だった10fpsには遠く及ばなかったという。
「そもそもリスク認識を10fpsで回し続ける必要があるのか、処理速度重視のプロンプトを使った方が良いのかなど、考えるところはいっぱいあるが、1パスを通すことができました。試行錯誤はまだまだ続きます」。(鷹野氏)
【トークセッション】 なぜ挑み続けられるのか─ADAS開発の現場を支える「人と環境」のリアル
4人のセッションが終わり、稲田氏を進行役に迎え、トークセッションが開催された。
デンソーエンジニアの「キャリア」を振り返る
稲田氏:どのようにして自分のキャリアを築いてきましたか。
野場氏:入社してから6年間ずっと筐体(きょうたい)設計に携わっていました。すごく良い職場だったのですが、私にはより安心安全に皆さんが運転できるような技術を自分で作っていきたいという夢がありました。デンソーにはそういう想いを打ち明けられる場があり、そこで当時の上司に話したところ、周囲のサポートもあり、自分の想いと一致するような部署に異動できました。
鷹野氏:野場さんが話したように、デンソーは自分の意見が通るいい会社だなと思います。社会人になったときは研究開発部門(R&D)がかっこいいと思い、R&Dの部署を希望していました。その後、エンジニアの自分が作ったAIが搭載されたクルマが走っている姿が見られるなど、量産の現場だからこそ学べる知識やロマンがあると思い、たくさんの人に調整してもらって量産の部署に移りました。
何世代かAIをリリースして、そろそろ次世代開発に携わりたいと思ったときに、また多くの人に声をかけて今の部署に異動しました。自分で動いていけるので、僕にとってはとても魅力的な会社だと思います。
二反田氏:私も海外で働きたい、最終的な製品に携わりたいという気持ちもあったので、量産の部隊に異動しました。社内の制度として異動のシステムがあるので、そういうものを使いながらキャリアデザインをしてきたという感じです。
デンソーエンジニアの「原動力」とは
稲田氏:量産化するには色々な苦労が伴います。そんな状況でも、なぜやり続けられるのでしょうか。皆さんの原動力を教えてください。
二反田氏:女性や新しく免許を取得した人のなかには、駐車が苦手と感じる人もたくさんいます。そんな人たちから「駐車する際の心配がなくなった」という声を聞くたびに、もっと頑張ろうと思える。
今は主に駐車が苦手な方からの声が大半ですが、駐車が得意な方でも使えるようなシステムにしていきたい。それが今後、頑張るエネルギー源になっていくと思います。
稲田氏:そうですね。運転がうまい人からするともう少しスマートに停めてほしいという期待があると思います。
鷹野氏:量産の部署はみんな泥臭いことをやりながらも、肩を組んでやっているみたいな感じが僕はすごく好きで、そういう現場があることを知れて良かった。社会人になってできた仲間と一緒に頑張った達成感は格別です。もっとデンソーでリリースに携わりたいと思います。
稲田氏:私も「Global Safety Package」の最初の世代のリリースを担当したのですが、その時に一緒になって汗を流したメンバーは、いまだに強いつながりがあります。そういうつながりもあるのが、デンソーのいいところの一つなのだと思いました。
野場氏:僕はデンソーでは珍しく運転が苦手な人間。新しい道を走るのも怖いですし、狭い道とかもできれば運転したくない。クルマの運転が怖いと思っているのは僕だけじゃないと思うんですよね。だから勝手にですけど、そういった想いも背負いながら安心安全なものを作っていきたいです。
稲田氏:私はもともとクルマが大好きで、デンソーに入社し今に至ります。これまでは、好きなクルマで事故を起こして悲しい思いをさせる人を減らしたいという想いから携わってきました。
最近は、低迷している日本の国力を、自動車産業の一員として盛り上げていきたいという想いを持ちながら、色々なことにチャレンジしています。
デンソーエンジニアの今後の「チャレンジテーマ」とは
稲田氏:最後のテーマです。皆さんは今後、どんなチャレンジをしていきたいですか。
鷹野氏:これまで量産で血の涙を流したところを、もっと良くしていきたいなと思います。今は次世代の製品の開発をしているわけですが、仲間たちがまだたくさん苦労しているところがあります。
量産側にいると、もっとこういう技術シーズを早めに持ってきて欲しかったという想いがあった。今は自分が技術シーズを届ける立場になっているので、量産側の人たちを助けたい、それが僕のチャレンジしたいことです。
野場氏:私は次世代センサフュージョン開発や自動運転向けの認識アルゴリズムの先行開発の分野に来てまだ日が浅いのですが、できることをどんどん増やしていくこと、究極を言えば認識できるようなものをほかの人よりも開発していくことがこれからのチャレンジですね。
二反田氏:1つ目は自動駐車をもう少し普及させること。駐車が苦手な人だけではなく、駐車が得意な人も使いたいと思えるものを世に送り出したいです。
2つ目はP2Pを広げていくこと。これは私たちの産業にとっても必要なことだと思っています。
3つ目は少し突飛かもしれませんが、我々が開発した技術をクルマ以外の製品やサービスなどに応用していきたい。この3つが私のチャレンジです。
【Q&Aセッション】
トークセッションが終わり、最後は質疑応答の時間が設けられた。抜粋して紹介する。
Q.テスラはLiDARなしでレベル5が可能としていますが、本当に可能だとお考えでしょうか。
野場氏:個人的な意見ですが、人間も目で運転していると思うので可能だとは思います。ですが、「交通事故死亡者ゼロ」を達成するためには、複数のセンサを活用して補完し合いながら実現するのが良いと思います。
鷹野氏:ある程度のものであればある時期にリリースはできると思いますが、あるレベルまで突き詰めるということになると、それなりの時間がかかるのかなと思います。
Q「レアケースに対応するための開発」と、「よくあるケースを確実に抑える精度向上の開発」の2つを考えたときに、開発コストのバランスをどのように考えて取り組んでいるのでしょうか。
稲田氏:当然、交通事故死亡者ゼロ実現に向けて取り組んで行くのですが、レアケースに対応しようとすると、より労力とコストがかかってしまう。ですが、これに対応することで、ドライバーが安心安全に楽に運転できる技術に転用できて、価値を生み出せるのではと考えています。したがって、安心さと快適さの両軸を持った機能として提供できるようにする。そこを果敢に攻めているところです。
Q.事故を減らすために、最終的には人間のドライバーは完全にいなくなる方がいいと思いますか。
二反田氏:個人的には事故を減らすためとはいえ、最終的にドライバーがいなくなるとはあまり思っていません。
運転が苦手な方は、自動運転を使いたいという気持ちはあると思いますが、車好きな方は、自分で運転する方が好きだと思います。
クルマ好きで自分で運転したいドライバーに対しても必要になるのが、自動運転的なものではなく、やっぱり事故を減らすような運転支援技術、ADASなのだと思います。
自動運転で完全にコントロールされていれば、事故はゼロになるかもしれません。私たちは事故ゼロとともに、移動の楽しみ、楽しい運転体験も追求していかなければならないと思います。
なので回答からはずれてしまうかもしれませんが、ドライバーがいる前提で事故を減らしていくところも、進めていくというのが私の意見です。
稲田氏:私も完全に自動で移動することだけが答えではないのではないかと思っています。自動運転のクルマと人が運転するクルマが混在した環境でも、どうすれば事故をゼロにできるのか。それが我々の目指すところなのかなと思っています。
文・編集=中村 仁美
※所属組織および取材内容は2025年8月時点の情報です。
株式会社デンソー
https://www.denso.com/jp/ja/
株式会社デンソー ソフトウェア特設ページ
https://careers.denso.com/software/
おすすめイベント


関連するイベント

現実世界の”見えないリスク”を可視化せよ─画像認識による危険検知/VL...
2025年07月25日 (金)おすすめの記事