
新着動画

命を守るソフトウェア検証の舞台裏――安全と品質を支える検証基盤づくり【DE...

0.0001秒の攻防!?快適な運転を支えるリアルタイム制御と組み込みエンジ...

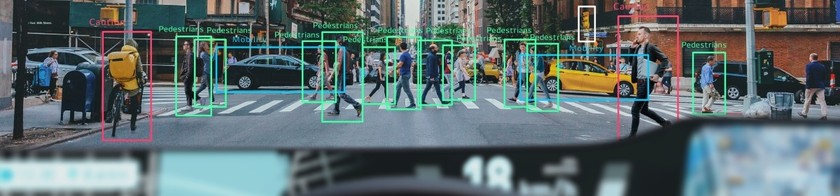
現実世界の”見えないリスク”を可視化せよ─画像認識による危険検知/VLMで...
新着マガジン

自動運転を支えるSoC開発最前線 ―車載AI普及への挑戦:数百億個のトラン...

【デンソー】命を守るソフトウェア検証の舞台裏――安全と品質を支える検証基盤...

2025年7月25日に開催されたオンラインイベントのアーカイブ動画となります。
イベントページ:https://techplay.jp/event/982632
-------------------------
▼イベント概要
見えないリスクをどう“捉える”か。
画像認識、センサフュージョン、VLM──
現場で磨かれた認識技術と先行研究の最前線を公開。
交通事故をゼロに近づけるために、クルマが周囲の情報をどこまで“正確に捉えられるか”が重要になっています。
DENSO Tech Night 第三夜では、“現実世界の不確かさ”と向き合いながら、画像認識・センサフュージョン・VLM(Vision-Language Model/視覚言語モデル)などの現場で危険検知精度を磨き続けるエンジニアたちの挑戦に迫ります。
たとえば、車を駐車する際に多くの人が頼るバックモニター。
その裏側では、魚眼レンズで歪んだ画像から、極めて高い精度で車体の位置や距離を捉える必要があります。
そんな厳しい制約のなか、ソフトウェアだけで完結せず、ハードに実装してトライ&エラーを重ねる──
この実装と検証を繰り返せる現場力こそが、デンソーの強みです。
画像やミリ波レーダ、センサデータの統合による周辺の情報を精度よく認識する先行開発では、シミュレーション上で設計したフュージョンモデルと、実機で得られるセンサデータとの整合性が大きな壁に。
限られた環境下での検証を積み重ねながら、少しずつ実世界との乖離を埋めていくプロセスにこそ、研究開発者としてのやりがいや面白さが宿っています。
また、先進安全システムをさらに進化させる研究開発として、カメラ単独と従来アルゴリズムの組み合わせでは“認識をすり抜けてしまう”潜在的な危険に対し、VLMを活用したアプローチも始まっています。
たとえば、バスの陰から何が飛び出すか──。
VLMの導入により、状況文脈から「この場所では子どもが出てくる確率が高い」といったリスクを認識し、ADAS制御へ反映させる試みが進んでいます。
一方で、LLM (Large Language Models) による自然言語出力の評価は「意味が合っていても、表現が異なれば不正解」とされる難しさもあり、評価方法や目標値設定、エッジかクラウドかといったアーキテクチャ設計においても試行錯誤が続いています。
ハードとソフト、量産と先行開発──
異なる開発フェーズをまたぐ連携の中で起きている、リアルな課題とブレイクスルー。
見えないリスクと向き合い続ける現場エンジニアの視点から、デンソーの技術開発の“今”をお届けします。
■どんな話が聞けるのか
・自動駐車を支える画像認識技術の実際──魚眼カメラによる物体認識の工夫
・設計だけでは済まない、現場での泥臭いトライ&エラーや検証のリアル
・世界中のユーザーが使う製品に、安全性をどう担保し続けているのか
・センサデータをどう扱い、どう統合し、実機とシミュレーションの差を埋めていくか
・Vision-Language Model(VLM)を用いた、リスク認識手法
・自然言語出力の正解はひとつじゃない──VLM評価の難しさと解決アプローチ
・「できたらすごい」を追う先行研究が、未来の安全技術にどうつながるか
■こんな方にオススメ
・自動車業界やモビリティ分野で画像認識やAI開発に携わるエンジニア
・組み込みソフトやADAS関連のシステム設計・実装に関心のある技術者
・センサフュージョン、VLM、LLMなどのAI技術の実装・応用に興味がある方
・量産現場の制約と先端研究の橋渡しにリアルな視点を求めている方
<Chapter>
00:00:00 オープニング
00:04:31 デンソーの技術開発のリアルな悩み?
00:15:04 駐車場での安心安全を世界中に!見えない危険を回避する自動駐車向け画像認識技術
00:26:53 目だけでは見えないリスクを発見!車両の周辺環境を高精度に認識するためのセンサフュージョン開発
00:36:39 カメラ画像内のリスクを先読みせよ!生成AIの設計・評価・エッジ組み込みで目指す、"熟練ドライバーレベルの安全運転"
00:49:22 【トークセッション】なぜ挑み続けられるのか──ADAS開発の現場を支える“人と環境”のリアル
01:04:52 質疑応答
01:21:30 クロージング
#デンソー#DENSO#アルゴリズム#大規模言語モデル#LLM#人工知能#TECHPLAY


